Continuously Improving Natural Language Understanding for Robotic Systems through Semantic Parsing, Dialog, and Multi-modal Perception
|
|
|
- Marilyn Glenn
- 6 years ago
- Views:
Transcription
1 Continuously Improving Natural Language Understanding for Robotic Systems through Semantic Parsing, Dialog, and Multi-modal Perception Jesse Thomason Doctoral Dissertation Proposal 1



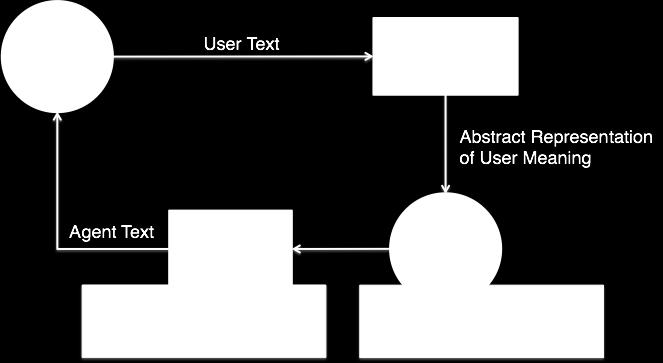
2 Natural Language Understanding for Robots Robots are increasingly present in human environments Stores, hospitals, factories, and offices People communicate in natural language Robots should understand and use natural language from humans 2
3 Natural Language Understanding for Robots Go to Alice s office and get the light mug for the chair. 3
4 Natural Language Understanding for Robots Go to Alice s office and get the light mug for the chair. Commands that need to be actualized through robot action 4
5 Natural Language Understanding for Robots Go to Alice s office and get the light mug for the chair. Commands that need to be actualized through robot action World knowledge about people and the surrounding office space 5
6 Natural Language Understanding for Robots Go to Alice s office and get the light mug for the chair. Commands that need to be actualized through robot action World knowledge about people and the surrounding office space Perception information to identify referent object 6
7 Natural Language Understanding for Robots As much as possible, solve these problems with given robot and domain Interaction with humans should strengthen understanding over time 7
8 Outline Background Completed work Proposed Work Conclusion 8
9 Background: Situating this Proposal Semantic Parsing This proposal Language Grounding 9
10 Background: Situating this Proposal Semantic Parsing Commanding Robots Dialog Language Grounding Multi-modal Perception Grounding Thomason, 2015 Thomason, 2016 Semantic Understanding Human-robot Interaction 10
11 Background: Situating this Proposal Language Grounding Semantic Parsing Thomason, 2015 Word-sense Induction Multi-modal Perception Grounding Thomason, in progress Thomason, 2016 Synonymy Detection Human-robot Interaction 11
12 Background: Situating this Proposal Semantic Parsing Thomason, 2015 Language Grounding This proposal Thomason, 2016 Thomason, in progress 12
13 Outline Background Semantic Parsing Language Grounding 13
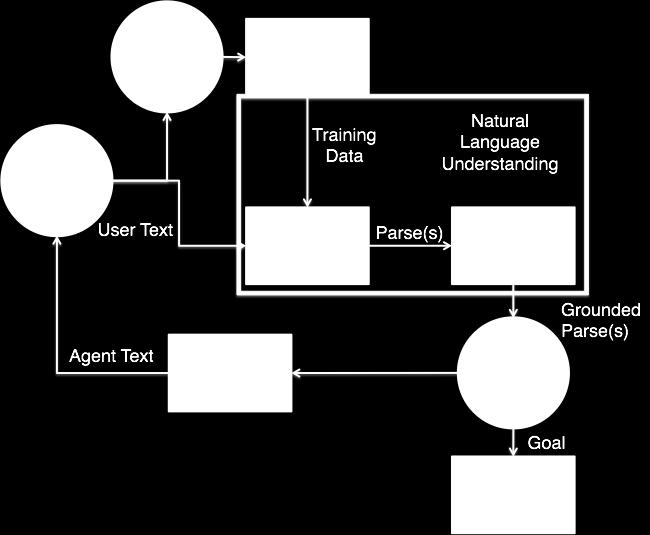
14 Background: Semantic Parsing Go to Alice s office and get the light mug for the chair. Semantic Parser Training Data go(the(ƛx.(office(x) owns(alice, x)))) deliver(the(ƛy.(light2(y) mug1_cup2(y))), bob) 14
15 Background: Semantic Parsing Translate from human language to formal language We use combinatory categorial grammar formalism (Zettlemoyer 2005) Words assigned part-of-speech-like categories Categories combine to form syntax of utterance 15
16 Background: Semantic Parsing Small example of composition Alice s office 16
17 Background: Semantic Parsing Small example of composition Add part-of-speech-like categories NP NP\NP/N Alice s N office 17
18 Background: Semantic Parsing Add part-of-speech-like categories Categories combine right (/) and left (\) to form trees NP NP\NP NP NP\NP/N Alice s N office 18
19 Background: Semantic Parsing Leaf-level semantic meanings can be propagated through tree the(ƛx.(office(x) owns(alice, x))) ƛy.(the(ƛx.(office(x) owns(y, x)))) alice ƛP.ƛy.(the(ƛx.(P(x) owns(y, x)))) office Alice s office 19
20 Background: Semantic Parsing `get refers to the action predicate deliver `light could mean light in color or light in weight bob is referred to as `the chair, his title Go to Alice s office and get the light mug for the chair. go(the(ƛx.(office(x) owns(alice, x)))) deliver(the(ƛy.(light2(y) mug1_cup2(y))), bob) 20
21 Background: Semantic Parsing Parsers can be trained from paired examples Sentences and their semantic forms Treat underlying tree structure as latent during inference (Liang 2015) With pairs of human commands and semantic forms, can train a semantic parser for robots 21
22 Background: Semantic Parsing Parsers can be trained from paired examples For example, parameterize parse decisions in a weighted perceptron model Word -> CCG assignment features CCG combination features Word -> semantics features Guide search for best parse using perceptron Update parameters during training by contrasting best scoring parse to known true parse; for example using hinge loss 22
23 Outline Background Semantic Parsing Language Grounding 23
24 Background: Language Grounding Go to Alice s office and get the light mug for the chair. World knowledge about people and the surrounding office space Perception information to identify referent object 24
25 Background: Language Grounding Some x that is an office and is owned by Alice Membership and ownership relations can be kept in a knowledge base Created by human annotators to describe surrounding environment Alice s office the(ƛx.(office(x) owns(alice, x))) 25
26 Background: Language Grounding Some y that is light in weight and could be described as a mug These predicates are perceptual in nature and require using sensors to examine real-world objects for membership the light mug the(ƛy.(light2(y) mug1_cup2(y))) 26
27 Background: Language Grounding word light mug cup instances 27










28 Background: Language Grounding word light mug cup instances predicate light1 light2 mug1_cup2 cup1 28
29 Outline Background Completed work Learning to Interpret Natural Language Commands through Human-Robot Dialog Learning Multi-Modal Grounded Linguistic Semantics by Playing I Spy Multi-modal Word Synset Induction Proposed Work Conclusion 29
30 Learning to Interpret Natural Language Commands through Human-Robot Dialog Semantic Parsing Commanding Robots Dialog Thomason, 2015 Semantic Understanding 30
31 31
32 Semantic Parsing Commanding Robots Dialog Thomason, 2015 Semantic Understanding 32
33 Dialog 33
34 Dialog + Commanding Robots Past work uses dialog as part of a pipeline for commanding robots (Matuszek, 2012; Mohan, 2012) Adding a dialog component allows the robot to refine its understanding 34

35 Dialog + Commanding Robots 35
36 Semantic Parsing Commanding Robots Dialog Thomason, 2015 Semantic Understanding 36
")
37 +Semantic Parsing Past work uses semantic parsing as an understanding step to command robots (Kollar, 2013) 37
38 Semantic Parsing Commanding Robots Dialog Thomason, 2015 Semantic Understanding 38
39 Generating New Training Examples Past work generates training data for a parser given a corpus of conversations (Artzi, 2011) We pair confirmed understanding from dialog with previous misunderstandings 39
40 40
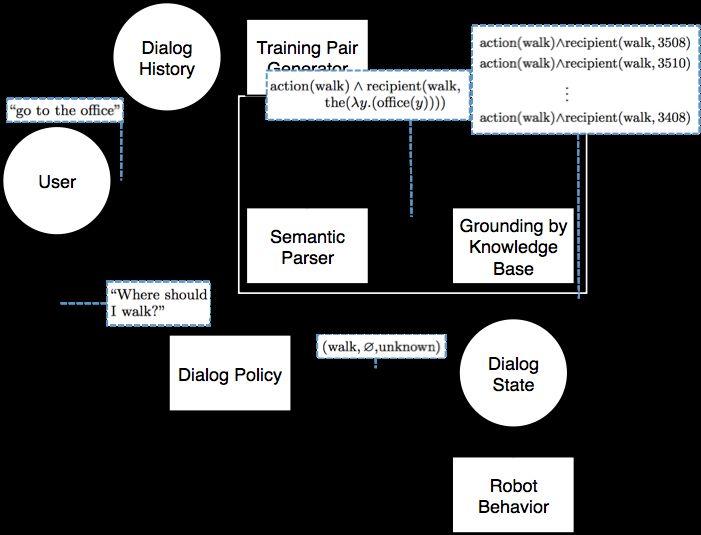
41 41
42 Generating New Training Examples 42
43 Generating New Training Examples 43
44 Generating New Training Examples 44

45 Generating New Training Examples 45

46 Generating New Training Examples 46
47 Generating New Training Examples 47
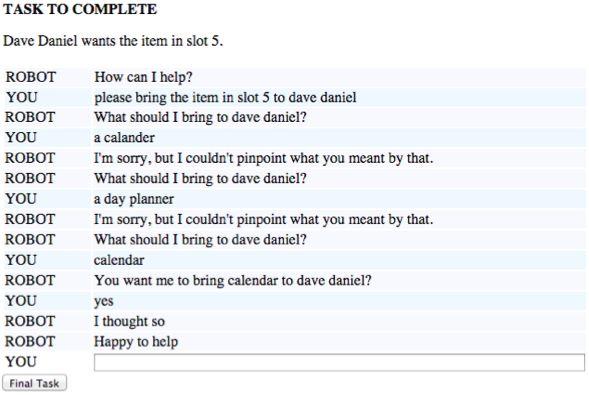
48 Experiments Hypothesis: Performing incremental re-training of a parser with sentence/parse pairs obtained through dialog will result in better user experience than using a pre-trained parser alone Tested via: Mechanical Turk - many users, unrealistic interaction (just text, no robot) Segbot Platform - few users, natural interactions with real world robot 48
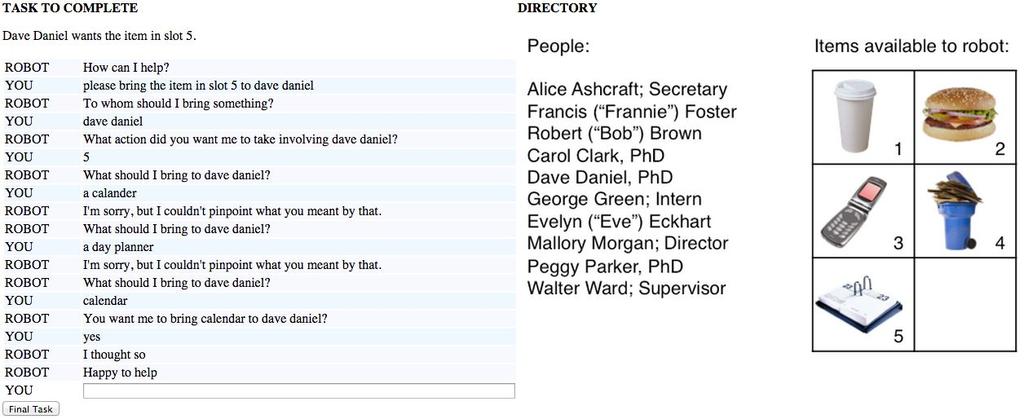
49 49
50 Mechanical Turk Experiment Four batches of ~100 users each Retraining after every batch (~50 training goals) Performance measured every batch (~50 testing goals) 50

51 Mechanical Turk Dialog Turns 51
52 Mechanical Turk Survey Responses 52

53 Mechanical Turk Survey Responses 53
54 Segbot Experiment 10 users with baseline system (no additional training) Robot roamed the office for four days 34 conversations with users in the office ended with training goals System re-trained after four days 10 users with re-trained system 54

55 Segbot Dialog Success 55

56 Segbot Survey Responses 56

57 Segbot Survey Responses 57
58 Contributions Lexical acquisition reduces dialog lengths for multi-argument predicates like delivery Retraining causes users to perceive the system as more understanding Retraining leads to less user frustration Inducing training data from dialogs allows good language understanding without large, annotated corpora to bootstrap system If use changes or new users with new lexical choices arrive, can adapt on-the-fly 58
59 Natural Language Understanding for Robots Go to Alice s office and get the light mug for the chair. Commands that need to be actualized through robot action World knowledge about people and the surrounding office space Perception information to identify referent object 59
60 Outline Background Completed work Learning to Interpret Natural Language Commands through Human-Robot Dialog Learning Multi-Modal Grounded Linguistic Semantics by Playing I Spy Multi-modal Word Synset Induction Proposed Work Conclusion 60
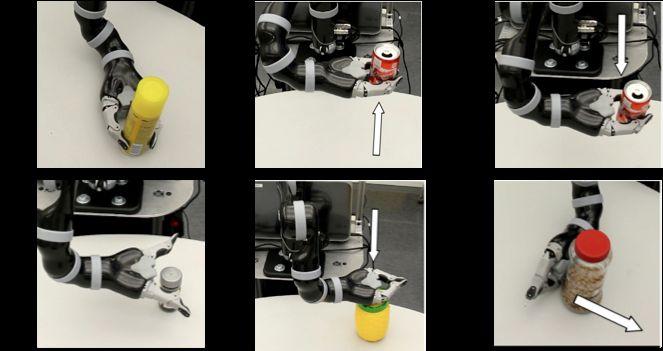
61 Learning Multi-Modal Grounded Linguistic Semantics by Playing I Spy Language Grounding Multi-modal Perception Grounding Thomason, 2016 Human-robot Interaction 61
62 An empty metallic aluminum container 62

63 Robot makes guesses until human confirms it found the right object. 63
64 Learning Multi-Modal Grounded Linguistic Semantics by Playing I Spy Language Grounding Multi-modal Perception Grounding Thomason, 2016 Human-robot Interaction 64
65 Grounding Mapping from expressions like ``light mug to an object in the real world is the symbol grounding problem (Harnad, 1990) Grounded language learning aims to solve this problem Loads of work connecting language to machine vision (Roy, 2002; Matuszek, 2012; Krishnamurthy, 2013; Christie, 2016) Some work connecting language to other perception, such as audio (Kiela, 2015) We ground words in more than just vision 65
66 Learning Multi-Modal Grounded Linguistic Semantics by Playing I Spy Language Grounding Multi-modal Perception Grounding Thomason, 2016 Human-robot Interaction 66
67 Multi-Modal Perception For every object, perform a set of exploratory behaviors (with robotic arm) (Sinapov, 2016) Gather audio signal, proprioceptive information, and haptic information (from arm motors) Look is just one way to explore; gather visual features such as VGG penultimate layer Feature representation of each object has many sensorimotor contexts Context is a combination of an exploratory behavior and associated sensory modality 67
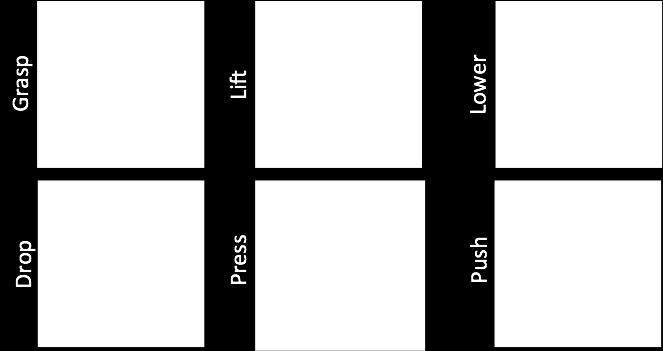
68 Multi-Modal Perception 68
69 Multi-Modal Perception Still need language labels for objects Annotating each object with every possible descriptor is unrealistic and boring Instead, we introduce a human-in-the-loop for learning In a game! 69
70 Learning Multi-Modal Grounded Linguistic Semantics by Playing I Spy Language Grounding Multi-modal Perception Grounding Thomason, 2016 Human-robot Interaction 70
71 Human-robot Interaction Past work has used I, Spy -like games to gather grounding annotations from users (Parde 2015) Human offers natural language description of object Robot strips stopwords and treats remaining words as predicate labels On robot s turn, use predicates to determine best way to describe target object After human guesses correct, ask for explicit yes/no on whether some predicates apply to target 71
72 Building Perceptual Classifiers Get positive labels from human descriptions of target objects Get positive and negative labels from yes/no answers to specific predicate questions Build SVM classifiers for each sensorimotor context given positive and negative objects for each predicate Predicate classifier is linear combination of context SVMs Weight each SVM s contribution by confidence using leave-on-out x-val over objects 72

73 Building Perceptual Classifiers Sensorimotor context SVMs Empty? Decision gives sign Kappa with human labels gives magnitude 73
74 Building Perceptual Classifiers Empty? (-0.04) =
75 Experiments 32 objects split into 4 folds of 8 objects each Games played with 4 objects at a time Two systems: vision only and multi-modal; former only uses look behavior Each participant played 4 games, 2 with each system (single blind), such that each system saw all 8 objects of the fold After each fold, systems predicate classifiers retrained given new labels Measure game performance; classifiers always seeing novel objects during evaluations 75
76 Results for Robot Guesses 76


77 Results for Predicate Agreement 77
78 Correlations to Physical Properties Calculated Pearson s r between predicate decisions in [-1, 1] and object height/weight vision only system learns no predicates with p < 0.05 and r > 0.5 multi-modal system learns several correlated predicates: tall with height (r = 0.521) small against weight (r = ) water with weight (r = 0.549) 78

79 A tall blue cylindrical container 79
80 Contributions We move beyond vision for grounding language predicates Auditory, haptic, and proprioceptive senses help understand words humans use to describe objects Some predicates assisted by multi-modal tall, wide, small Some can be impossible without multi-modal half-full, rattles, empty 80
81 Natural Language Understanding for Robots Go to Alice s office and get the light mug for the chair. Commands that need to be actualized through robot action World knowledge about people and the surrounding office space Perception information to identify referent object But we don t handle different senses of light... 81
82 Outline Background Completed work Learning to Interpret Natural Language Commands through Human-Robot Dialog Learning Multi-Modal Grounded Linguistic Semantics by Playing I Spy Multi-modal Word Synset Induction Proposed Work Conclusion 82
83 Multi-modal Word Synset Induction Language Grounding Word-sense Induction Multi-modal Perception Grounding Thomason, in progress Thomason, 2016 Synonymy Detection Human-robot Interaction 83
84 Multi-modal Word Synset Induction Words from I, Spy do not have a one-to-one mapping with perceptual predicates Light can mean lightweight or light in color (polysemy) Claret and purple refer to the same property (synonymy) Words have one or more senses A group of synonymous senses is called a synset (synonym sense set) 84
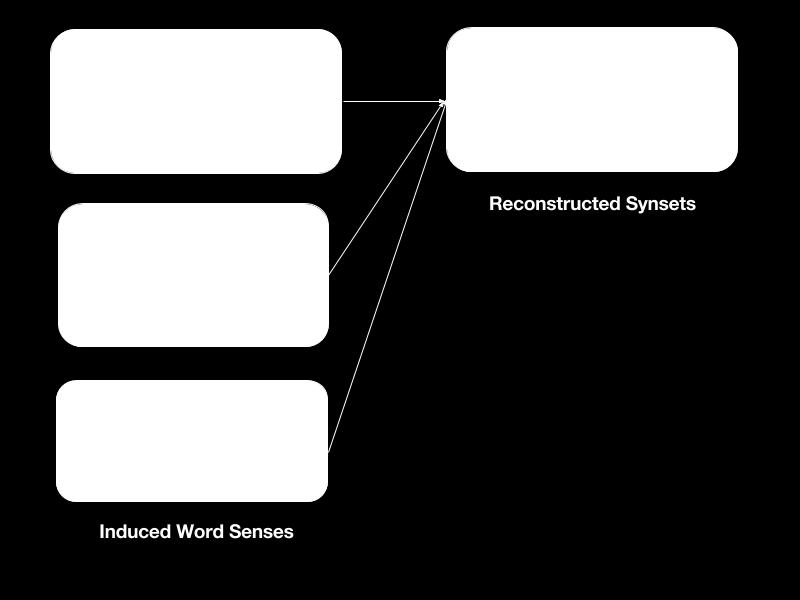
85 Multi-modal Word Synset Induction Language Grounding Word-sense Induction Multi-modal Perception Grounding Thomason, in progress Thomason, 2016 Synonymy Detection Human-robot Interaction 85
86 Word Sense Induction Task of discovering word senses Bat Light Weight, color Kiwi Baseball, animal Fruit, bird, people Represent instances as vectors of their context; cluster to find senses 86
87 Multi-modal Word Synset Induction Language Grounding Word-sense Induction Multi-modal Perception Grounding Thomason, in progress Thomason, 2016 Synonymy Detection Human-robot Interaction 87
88 Synonymy Detection Given words or word senses, find synonyms Claret and purple Round and circular Kiwi and New Zealander (some some sense of kiwi ) Represent instances as vectors of their context; cluster means to find synonyms 88
89 Multi-modal Word Synset Induction Language Grounding Word-sense Induction Multi-modal Perception Grounding Thomason, in progress Thomason, 2016 Synonymy Detection Human-robot Interaction 89





90 Multi-modal Perception Can use more than text to contextualize a word Pictures depicting the word or phrase give visual information 90
91 Methods Gather synsets and images from ImageNet All leaves; mix of polysemous, synonymous, and neither polysemous nor synonymous noun phrases Provides gold synsets we can aim to reconstruct from image-level instances 91


92 ImageNet Synsets to Mixed-sense Noun Phrases 92
93 Goal Reconstruct ImageNet-like synsets First perform word-sense induction on mixed-sense noun phrase inputs Given induced word senses, perform synonymy detection to form synsets Use reverse-image search to find webpages of text for each image Get textual features and perform methods in multi-modal space 93

94 Word Sense Induction 94

95 Synonymy Detection 95
96 Methods Commonly used VGG network to generate visual features (Simonyan 2014) Latent semantic analysis (LSA) of web pages to form textual feature space Images used to train VGG held out as development data for LSA and setting parameters 96
97 Methods Word sense induction Use non-parametric k-means approach based on the gap statistic (Tibshirani 2001) to discover senses Synonymy detection Use a nearest-neighbor method to join senses into synsets up to a pre-specified number of synsets estimated from development data 97
98 Preliminary Results Evaluate match of reconstructed and ImageNet synsets using v-measure (Rosenberg, 2007) and paired f-measure Quantitative evaluation unsurprising but disappointing Precision-like metrics improved by polysemy detection (WSI) Recall-like metrics improved by synonymy detection Multi-modal pipeline for both outperforms uni-modal pipelines ImageNet synsets are actually quite noisy and hard to recreate unsupervised 98
99 Preliminary Results ImageNet synsets are actually quite noisy and hard to recreate unsupervised Austrian and Ukranian in separate synsets Energizer in a synset containing pictures of people in suits We plan a human evaluation to establish the better interpretability of our reconstructed synsets versus ImageNet s For example, our methods construct big synsets full of people for noun phrases Austrian, Ukranian, kiwi, energizer, etc 99
100 Outline Background Completed work Proposed Work Conclusion 100
101 Natural Language Understanding for Robots Go to Alice s office and get the light mug for the chair. Commands that need to be actualized through robot action World knowledge about people and the surrounding office space Perception information to identify referent object Now we have methodology to identify senses of light 101
102 Natural Language Understanding for Robots Go to Alice s office and get the light mug for the chair. Our proposed work focuses on integrating completed work to accomplish all these understanding components at once 102
103 Situating this Proposal Semantic Parsing Thomason, 2015 Language Grounding This proposal Thomason, 2016 Thomason, in progress 103
104 Outline Background Completed work Proposed Work Synset Induction for Multi-modal Grounded Predicates Grounding Semantic Parses Against Knowledge and Perception Long-term Proposals Conclusion 104
105 Synset Induction for Multi-modal Grounded Predicates Go to Alice s office and get the light mug for the chair. Perception information to identify referent object Now we have methodology to identify senses of light Need to integrate with I, Spy multi-modal perception 105
106 Synset Induction for Grounded Predicates In I, Spy, users used polysemous words like light Synset induction could combine the color-sense of light with pale, a rarer descriptor mug1_cup2 Expect synset-level classifiers to have cleaner positive examples (single-sense) and more of them (from multiple words) 106
107 Synset Induction for Grounded Predicates Differs from completed work on synset induction Multiple labels per object, rather than single noun phrase associated with each Completed work with two modalities simply averaged representation vector distances With many multiple perceptual contexts, more sophisticated combination strategies may be possible For example, light senses are visible by comparing context relevance 107
108 Outline Background Completed work Proposed Work Synset Induction for Multi-modal Grounded Predicates Grounding Semantic Parses Against Knowledge and Perception Long-term Proposals Conclusion 108
109 Grounding Semantic Parses against Knowledge and Perception Go to Alice s office and get the light mug for the chair. Commands that need to be actualized through robot action World knowledge about people and the surrounding office space Perception information to identify referent object An integrated system of completed works could achieve all goals Creates new challenges Affords new opportunities for continuous learning 109
110 Predicate Induction In vanilla semantic parsing, all predicates are known in a given ontology People may use words to express new concepts after the I, Spy -style bootstrapping phase Take that tiny box to Bob Does unseen word tiny refer to a novel concept or existing synset? Unseen adjectives and nouns start as novel single-sense synsets Synset induction can later collapse these to their synonyms (here, small) Other words, like pointy, may refer to formerly unseen concepts 110
111 Semantic Re-ranking from Perception Confidence Parser can return many parses, ranked with confidence values Perception predicates return confidence per object in the environment Combine confidences to get joint decision on understanding the light mug p a r s e object 1 object 2 p e r p e r 0.6 light1 mug light2 mug re-ranking 0.6 * 0.3 * 0.8 = light1 mug1 0.4 * 0.7 * 0.8 = light2 mug1 111
112 Perception Training Data from Dialog Bring me the light mug Human can confirm correct object was delivered Then delivered object is positive example for light2 and mug1 112
113 Outline Background Completed work Proposed Work Synset Induction for Multi-modal Grounded Predicates Grounding Semantic Parses Against Knowledge and Perception Long-term Proposals Conclusion 113
114 Intelligent Exploration of Novel Objects get the pink marker Don t need to lift, drop, etc. a new object to determine whether it s pink Can consult sensorimotor context classifiers for pink to determine which behaviors are most informative (e.g. look) Still need to lift objects to determine heavy 114
115 Positive-unlabeled Learning for Perception SVMs currently power sensorimotor context classifiers Require positive and negative object examples to make decisions Could swap these out for positive-unlabeled learning methods Only positive examples needed, so data could come from dialog alone Confirm referent object with human to get positive examples for predicates involved 115
116 Leveraging Accommodation Want humans and robots to communicate effectively Can try to modify human utterances in a natural way in addition to better understanding them Accommodation is a natural phenomenon Lexical and syntactic agreement; pitch and loudness convergence Have dialog generate utterances it would understand well itself Tacitly encourage user to speak in ways the NLU better understands 116
117 Outline Background Completed work Proposed Work Conclusion 117
118 Natural Language Understanding for Robots Go to Alice s office and get the light mug for the chair. 118
119 Natural Language Understanding for Robots Go to Alice s office and get the light mug for the chair. Commands that need to be actualized through robot action World knowledge about people and the surrounding office space Perception information to identify referent object 119
120 Natural Language Understanding for Robots Go to Alice s office and get the light mug for the chair. Commands that need to be actualized through robot action World knowledge about people and the surrounding office space Perception information to identify referent object Even with polysemy 120
121 Natural Language Understanding for Robots Go to Alice s office and get the light mug for the chair. Commands that need to be actualized through robot action World knowledge about people and the surrounding office space Perception information to identify referent object Even with polysemy 121
122 Natural Language Understanding for Robots Go to Alice s office and get the light mug for the chair. 122
123 Natural Language Understanding for Robots I will go to Room 1, pick up a light mug object, and deliver it to Bob. 123
124 Continuously Improving Natural Language Understanding for Robotic Systems through Semantic Parsing, Dialog, and Multi-modal Perception Jesse Thomason Doctoral Dissertation Proposal 124
Module 12. Machine Learning. Version 2 CSE IIT, Kharagpur
 Module 12 Machine Learning 12.1 Instructional Objective The students should understand the concept of learning systems Students should learn about different aspects of a learning system Students should
Module 12 Machine Learning 12.1 Instructional Objective The students should understand the concept of learning systems Students should learn about different aspects of a learning system Students should
Using dialogue context to improve parsing performance in dialogue systems
 Using dialogue context to improve parsing performance in dialogue systems Ivan Meza-Ruiz and Oliver Lemon School of Informatics, Edinburgh University 2 Buccleuch Place, Edinburgh I.V.Meza-Ruiz@sms.ed.ac.uk,
Using dialogue context to improve parsing performance in dialogue systems Ivan Meza-Ruiz and Oliver Lemon School of Informatics, Edinburgh University 2 Buccleuch Place, Edinburgh I.V.Meza-Ruiz@sms.ed.ac.uk,
The stages of event extraction
 The stages of event extraction David Ahn Intelligent Systems Lab Amsterdam University of Amsterdam ahn@science.uva.nl Abstract Event detection and recognition is a complex task consisting of multiple sub-tasks
The stages of event extraction David Ahn Intelligent Systems Lab Amsterdam University of Amsterdam ahn@science.uva.nl Abstract Event detection and recognition is a complex task consisting of multiple sub-tasks
Probabilistic Latent Semantic Analysis
 Probabilistic Latent Semantic Analysis Thomas Hofmann Presentation by Ioannis Pavlopoulos & Andreas Damianou for the course of Data Mining & Exploration 1 Outline Latent Semantic Analysis o Need o Overview
Probabilistic Latent Semantic Analysis Thomas Hofmann Presentation by Ioannis Pavlopoulos & Andreas Damianou for the course of Data Mining & Exploration 1 Outline Latent Semantic Analysis o Need o Overview
Python Machine Learning
 Python Machine Learning Unlock deeper insights into machine learning with this vital guide to cuttingedge predictive analytics Sebastian Raschka [ PUBLISHING 1 open source I community experience distilled
Python Machine Learning Unlock deeper insights into machine learning with this vital guide to cuttingedge predictive analytics Sebastian Raschka [ PUBLISHING 1 open source I community experience distilled
AQUA: An Ontology-Driven Question Answering System
 AQUA: An Ontology-Driven Question Answering System Maria Vargas-Vera, Enrico Motta and John Domingue Knowledge Media Institute (KMI) The Open University, Walton Hall, Milton Keynes, MK7 6AA, United Kingdom.
AQUA: An Ontology-Driven Question Answering System Maria Vargas-Vera, Enrico Motta and John Domingue Knowledge Media Institute (KMI) The Open University, Walton Hall, Milton Keynes, MK7 6AA, United Kingdom.
11/29/2010. Statistical Parsing. Statistical Parsing. Simple PCFG for ATIS English. Syntactic Disambiguation
 tatistical Parsing (Following slides are modified from Prof. Raymond Mooney s slides.) tatistical Parsing tatistical parsing uses a probabilistic model of syntax in order to assign probabilities to each
tatistical Parsing (Following slides are modified from Prof. Raymond Mooney s slides.) tatistical Parsing tatistical parsing uses a probabilistic model of syntax in order to assign probabilities to each
English Language and Applied Linguistics. Module Descriptions 2017/18
 English Language and Applied Linguistics Module Descriptions 2017/18 Level I (i.e. 2 nd Yr.) Modules Please be aware that all modules are subject to availability. If you have any questions about the modules,
English Language and Applied Linguistics Module Descriptions 2017/18 Level I (i.e. 2 nd Yr.) Modules Please be aware that all modules are subject to availability. If you have any questions about the modules,
(Sub)Gradient Descent
Gradient Descent") (Sub)Gradient Descent CMSC 422 MARINE CARPUAT marine@cs.umd.edu Figures credit: Piyush Rai Logistics Midterm is on Thursday 3/24 during class time closed book/internet/etc, one page of notes. will include
(Sub)Gradient Descent CMSC 422 MARINE CARPUAT marine@cs.umd.edu Figures credit: Piyush Rai Logistics Midterm is on Thursday 3/24 during class time closed book/internet/etc, one page of notes. will include
arxiv: v1 [cs.cv] 10 May 2017
![arxiv: v1 [cs.cv] 10 May 2017](/thumbs/71/66178677.jpg "arxiv: v1 [cs.cv] 10 May 2017") Inferring and Executing Programs for Visual Reasoning Justin Johnson 1 Bharath Hariharan 2 Laurens van der Maaten 2 Judy Hoffman 1 Li Fei-Fei 1 C. Lawrence Zitnick 2 Ross Girshick 2 1 Stanford University
Inferring and Executing Programs for Visual Reasoning Justin Johnson 1 Bharath Hariharan 2 Laurens van der Maaten 2 Judy Hoffman 1 Li Fei-Fei 1 C. Lawrence Zitnick 2 Ross Girshick 2 1 Stanford University
Semi-supervised methods of text processing, and an application to medical concept extraction. Yacine Jernite Text-as-Data series September 17.
 Semi-supervised methods of text processing, and an application to medical concept extraction Yacine Jernite Text-as-Data series September 17. 2015 What do we want from text? 1. Extract information 2. Link
Semi-supervised methods of text processing, and an application to medical concept extraction Yacine Jernite Text-as-Data series September 17. 2015 What do we want from text? 1. Extract information 2. Link
LEARNING A SEMANTIC PARSER FROM SPOKEN UTTERANCES. Judith Gaspers and Philipp Cimiano
 LEARNING A SEMANTIC PARSER FROM SPOKEN UTTERANCES Judith Gaspers and Philipp Cimiano Semantic Computing Group, CITEC, Bielefeld University {jgaspers cimiano}@cit-ec.uni-bielefeld.de ABSTRACT Semantic parsers
LEARNING A SEMANTIC PARSER FROM SPOKEN UTTERANCES Judith Gaspers and Philipp Cimiano Semantic Computing Group, CITEC, Bielefeld University {jgaspers cimiano}@cit-ec.uni-bielefeld.de ABSTRACT Semantic parsers
Assignment 1: Predicting Amazon Review Ratings
 Assignment 1: Predicting Amazon Review Ratings 1 Dataset Analysis Richard Park r2park@acsmail.ucsd.edu February 23, 2015 The dataset selected for this assignment comes from the set of Amazon reviews for
Assignment 1: Predicting Amazon Review Ratings 1 Dataset Analysis Richard Park r2park@acsmail.ucsd.edu February 23, 2015 The dataset selected for this assignment comes from the set of Amazon reviews for
Language Acquisition Fall 2010/Winter Lexical Categories. Afra Alishahi, Heiner Drenhaus
 Language Acquisition Fall 2010/Winter 2011 Lexical Categories Afra Alishahi, Heiner Drenhaus Computational Linguistics and Phonetics Saarland University Children s Sensitivity to Lexical Categories Look,
Language Acquisition Fall 2010/Winter 2011 Lexical Categories Afra Alishahi, Heiner Drenhaus Computational Linguistics and Phonetics Saarland University Children s Sensitivity to Lexical Categories Look,
CS Machine Learning
 CS 478 - Machine Learning Projects Data Representation Basic testing and evaluation schemes CS 478 Data and Testing 1 Programming Issues l Program in any platform you want l Realize that you will be doing
CS 478 - Machine Learning Projects Data Representation Basic testing and evaluation schemes CS 478 Data and Testing 1 Programming Issues l Program in any platform you want l Realize that you will be doing
The MEANING Multilingual Central Repository
 The MEANING Multilingual Central Repository J. Atserias, L. Villarejo, G. Rigau, E. Agirre, J. Carroll, B. Magnini, P. Vossen January 27, 2004 http://www.lsi.upc.es/ nlp/meaning Jordi Atserias TALP Index
The MEANING Multilingual Central Repository J. Atserias, L. Villarejo, G. Rigau, E. Agirre, J. Carroll, B. Magnini, P. Vossen January 27, 2004 http://www.lsi.upc.es/ nlp/meaning Jordi Atserias TALP Index
Compositional Semantics
 Compositional Semantics CMSC 723 / LING 723 / INST 725 MARINE CARPUAT marine@cs.umd.edu Words, bag of words Sequences Trees Meaning Representing Meaning An important goal of NLP/AI: convert natural language
Compositional Semantics CMSC 723 / LING 723 / INST 725 MARINE CARPUAT marine@cs.umd.edu Words, bag of words Sequences Trees Meaning Representing Meaning An important goal of NLP/AI: convert natural language
A Case Study: News Classification Based on Term Frequency
 A Case Study: News Classification Based on Term Frequency Petr Kroha Faculty of Computer Science University of Technology 09107 Chemnitz Germany kroha@informatik.tu-chemnitz.de Ricardo Baeza-Yates Center
A Case Study: News Classification Based on Term Frequency Petr Kroha Faculty of Computer Science University of Technology 09107 Chemnitz Germany kroha@informatik.tu-chemnitz.de Ricardo Baeza-Yates Center
Extracting Opinion Expressions and Their Polarities Exploration of Pipelines and Joint Models
 Extracting Opinion Expressions and Their Polarities Exploration of Pipelines and Joint Models Richard Johansson and Alessandro Moschitti DISI, University of Trento Via Sommarive 14, 38123 Trento (TN),
Extracting Opinion Expressions and Their Polarities Exploration of Pipelines and Joint Models Richard Johansson and Alessandro Moschitti DISI, University of Trento Via Sommarive 14, 38123 Trento (TN),
Lecture 1: Basic Concepts of Machine Learning
 Lecture 1: Basic Concepts of Machine Learning Cognitive Systems - Machine Learning Ute Schmid (lecture) Johannes Rabold (practice) Based on slides prepared March 2005 by Maximilian Röglinger, updated 2010
Lecture 1: Basic Concepts of Machine Learning Cognitive Systems - Machine Learning Ute Schmid (lecture) Johannes Rabold (practice) Based on slides prepared March 2005 by Maximilian Röglinger, updated 2010
Grounding Language for Interactive Task Learning
 Grounding Language for Interactive Task Learning Peter Lindes, Aaron Mininger, James R. Kirk, and John E. Laird Computer Science and Engineering University of Michigan, Ann Arbor, MI 48109-2121 {plindes,
Grounding Language for Interactive Task Learning Peter Lindes, Aaron Mininger, James R. Kirk, and John E. Laird Computer Science and Engineering University of Michigan, Ann Arbor, MI 48109-2121 {plindes,
THE ROLE OF DECISION TREES IN NATURAL LANGUAGE PROCESSING
 SISOM & ACOUSTICS 2015, Bucharest 21-22 May THE ROLE OF DECISION TREES IN NATURAL LANGUAGE PROCESSING MarilenaăLAZ R 1, Diana MILITARU 2 1 Military Equipment and Technologies Research Agency, Bucharest,
SISOM & ACOUSTICS 2015, Bucharest 21-22 May THE ROLE OF DECISION TREES IN NATURAL LANGUAGE PROCESSING MarilenaăLAZ R 1, Diana MILITARU 2 1 Military Equipment and Technologies Research Agency, Bucharest,
Word Sense Disambiguation
 Word Sense Disambiguation D. De Cao R. Basili Corso di Web Mining e Retrieval a.a. 2008-9 May 21, 2009 Excerpt of the R. Mihalcea and T. Pedersen AAAI 2005 Tutorial, at: http://www.d.umn.edu/ tpederse/tutorials/advances-in-wsd-aaai-2005.ppt
Word Sense Disambiguation D. De Cao R. Basili Corso di Web Mining e Retrieval a.a. 2008-9 May 21, 2009 Excerpt of the R. Mihalcea and T. Pedersen AAAI 2005 Tutorial, at: http://www.d.umn.edu/ tpederse/tutorials/advances-in-wsd-aaai-2005.ppt
Lecture 1: Machine Learning Basics
 1/69 Lecture 1: Machine Learning Basics Ali Harakeh University of Waterloo WAVE Lab ali.harakeh@uwaterloo.ca May 1, 2017 2/69 Overview 1 Learning Algorithms 2 Capacity, Overfitting, and Underfitting 3
1/69 Lecture 1: Machine Learning Basics Ali Harakeh University of Waterloo WAVE Lab ali.harakeh@uwaterloo.ca May 1, 2017 2/69 Overview 1 Learning Algorithms 2 Capacity, Overfitting, and Underfitting 3
Intra-talker Variation: Audience Design Factors Affecting Lexical Selections
 Tyler Perrachione LING 451-0 Proseminar in Sound Structure Prof. A. Bradlow 17 March 2006 Intra-talker Variation: Audience Design Factors Affecting Lexical Selections Abstract Although the acoustic and
Tyler Perrachione LING 451-0 Proseminar in Sound Structure Prof. A. Bradlow 17 March 2006 Intra-talker Variation: Audience Design Factors Affecting Lexical Selections Abstract Although the acoustic and
Speech Recognition at ICSI: Broadcast News and beyond
 Speech Recognition at ICSI: Broadcast News and beyond Dan Ellis International Computer Science Institute, Berkeley CA Outline 1 2 3 The DARPA Broadcast News task Aspects of ICSI
Speech Recognition at ICSI: Broadcast News and beyond Dan Ellis International Computer Science Institute, Berkeley CA Outline 1 2 3 The DARPA Broadcast News task Aspects of ICSI
Learning Structural Correspondences Across Different Linguistic Domains with Synchronous Neural Language Models
 Learning Structural Correspondences Across Different Linguistic Domains with Synchronous Neural Language Models Stephan Gouws and GJ van Rooyen MIH Medialab, Stellenbosch University SOUTH AFRICA {stephan,gvrooyen}@ml.sun.ac.za
Learning Structural Correspondences Across Different Linguistic Domains with Synchronous Neural Language Models Stephan Gouws and GJ van Rooyen MIH Medialab, Stellenbosch University SOUTH AFRICA {stephan,gvrooyen}@ml.sun.ac.za
Multilingual Sentiment and Subjectivity Analysis
 Multilingual Sentiment and Subjectivity Analysis Carmen Banea and Rada Mihalcea Department of Computer Science University of North Texas rada@cs.unt.edu, carmen.banea@gmail.com Janyce Wiebe Department
Multilingual Sentiment and Subjectivity Analysis Carmen Banea and Rada Mihalcea Department of Computer Science University of North Texas rada@cs.unt.edu, carmen.banea@gmail.com Janyce Wiebe Department
A Bayesian Learning Approach to Concept-Based Document Classification
 Databases and Information Systems Group (AG5) Max-Planck-Institute for Computer Science Saarbrücken, Germany A Bayesian Learning Approach to Concept-Based Document Classification by Georgiana Ifrim Supervisors
Databases and Information Systems Group (AG5) Max-Planck-Institute for Computer Science Saarbrücken, Germany A Bayesian Learning Approach to Concept-Based Document Classification by Georgiana Ifrim Supervisors
Online Updating of Word Representations for Part-of-Speech Tagging
 Online Updating of Word Representations for Part-of-Speech Tagging Wenpeng Yin LMU Munich wenpeng@cis.lmu.de Tobias Schnabel Cornell University tbs49@cornell.edu Hinrich Schütze LMU Munich inquiries@cislmu.org
Online Updating of Word Representations for Part-of-Speech Tagging Wenpeng Yin LMU Munich wenpeng@cis.lmu.de Tobias Schnabel Cornell University tbs49@cornell.edu Hinrich Schütze LMU Munich inquiries@cislmu.org
Linking Task: Identifying authors and book titles in verbose queries
 Linking Task: Identifying authors and book titles in verbose queries Anaïs Ollagnier, Sébastien Fournier, and Patrice Bellot Aix-Marseille University, CNRS, ENSAM, University of Toulon, LSIS UMR 7296,
Linking Task: Identifying authors and book titles in verbose queries Anaïs Ollagnier, Sébastien Fournier, and Patrice Bellot Aix-Marseille University, CNRS, ENSAM, University of Toulon, LSIS UMR 7296,
Syntax Parsing 1. Grammars and parsing 2. Top-down and bottom-up parsing 3. Chart parsers 4. Bottom-up chart parsing 5. The Earley Algorithm
 Syntax Parsing 1. Grammars and parsing 2. Top-down and bottom-up parsing 3. Chart parsers 4. Bottom-up chart parsing 5. The Earley Algorithm syntax: from the Greek syntaxis, meaning setting out together
Syntax Parsing 1. Grammars and parsing 2. Top-down and bottom-up parsing 3. Chart parsers 4. Bottom-up chart parsing 5. The Earley Algorithm syntax: from the Greek syntaxis, meaning setting out together
Chunk Parsing for Base Noun Phrases using Regular Expressions. Let s first let the variable s0 be the sentence tree of the first sentence.
 NLP Lab Session Week 8 October 15, 2014 Noun Phrase Chunking and WordNet in NLTK Getting Started In this lab session, we will work together through a series of small examples using the IDLE window and
NLP Lab Session Week 8 October 15, 2014 Noun Phrase Chunking and WordNet in NLTK Getting Started In this lab session, we will work together through a series of small examples using the IDLE window and
Experiments with SMS Translation and Stochastic Gradient Descent in Spanish Text Author Profiling
 Experiments with SMS Translation and Stochastic Gradient Descent in Spanish Text Author Profiling Notebook for PAN at CLEF 2013 Andrés Alfonso Caurcel Díaz 1 and José María Gómez Hidalgo 2 1 Universidad
Experiments with SMS Translation and Stochastic Gradient Descent in Spanish Text Author Profiling Notebook for PAN at CLEF 2013 Andrés Alfonso Caurcel Díaz 1 and José María Gómez Hidalgo 2 1 Universidad
Specification and Evaluation of Machine Translation Toy Systems - Criteria for laboratory assignments
 Specification and Evaluation of Machine Translation Toy Systems - Criteria for laboratory assignments Cristina Vertan, Walther v. Hahn University of Hamburg, Natural Language Systems Division Hamburg,
Specification and Evaluation of Machine Translation Toy Systems - Criteria for laboratory assignments Cristina Vertan, Walther v. Hahn University of Hamburg, Natural Language Systems Division Hamburg,
What Can Neural Networks Teach us about Language? Graham Neubig a2-dlearn 11/18/2017
 What Can Neural Networks Teach us about Language? Graham Neubig a2-dlearn 11/18/2017 Supervised Training of Neural Networks for Language Training Data Training Model this is an example the cat went to
What Can Neural Networks Teach us about Language? Graham Neubig a2-dlearn 11/18/2017 Supervised Training of Neural Networks for Language Training Data Training Model this is an example the cat went to
Using Web Searches on Important Words to Create Background Sets for LSI Classification
 Using Web Searches on Important Words to Create Background Sets for LSI Classification Sarah Zelikovitz and Marina Kogan College of Staten Island of CUNY 2800 Victory Blvd Staten Island, NY 11314 Abstract
Using Web Searches on Important Words to Create Background Sets for LSI Classification Sarah Zelikovitz and Marina Kogan College of Staten Island of CUNY 2800 Victory Blvd Staten Island, NY 11314 Abstract
Ensemble Technique Utilization for Indonesian Dependency Parser
 Ensemble Technique Utilization for Indonesian Dependency Parser Arief Rahman Institut Teknologi Bandung Indonesia 23516008@std.stei.itb.ac.id Ayu Purwarianti Institut Teknologi Bandung Indonesia ayu@stei.itb.ac.id
Ensemble Technique Utilization for Indonesian Dependency Parser Arief Rahman Institut Teknologi Bandung Indonesia 23516008@std.stei.itb.ac.id Ayu Purwarianti Institut Teknologi Bandung Indonesia ayu@stei.itb.ac.id
Leveraging Sentiment to Compute Word Similarity
 Leveraging Sentiment to Compute Word Similarity Balamurali A.R., Subhabrata Mukherjee, Akshat Malu and Pushpak Bhattacharyya Dept. of Computer Science and Engineering, IIT Bombay 6th International Global
Leveraging Sentiment to Compute Word Similarity Balamurali A.R., Subhabrata Mukherjee, Akshat Malu and Pushpak Bhattacharyya Dept. of Computer Science and Engineering, IIT Bombay 6th International Global
AGENDA LEARNING THEORIES LEARNING THEORIES. Advanced Learning Theories 2/22/2016
 AGENDA Advanced Learning Theories Alejandra J. Magana, Ph.D. admagana@purdue.edu Introduction to Learning Theories Role of Learning Theories and Frameworks Learning Design Research Design Dual Coding Theory
AGENDA Advanced Learning Theories Alejandra J. Magana, Ph.D. admagana@purdue.edu Introduction to Learning Theories Role of Learning Theories and Frameworks Learning Design Research Design Dual Coding Theory
Prediction of Maximal Projection for Semantic Role Labeling
 Prediction of Maximal Projection for Semantic Role Labeling Weiwei Sun, Zhifang Sui Institute of Computational Linguistics Peking University Beijing, 100871, China {ws, szf}@pku.edu.cn Haifeng Wang Toshiba
Prediction of Maximal Projection for Semantic Role Labeling Weiwei Sun, Zhifang Sui Institute of Computational Linguistics Peking University Beijing, 100871, China {ws, szf}@pku.edu.cn Haifeng Wang Toshiba
Multi-Lingual Text Leveling
 Multi-Lingual Text Leveling Salim Roukos, Jerome Quin, and Todd Ward IBM T. J. Watson Research Center, Yorktown Heights, NY 10598 {roukos,jlquinn,tward}@us.ibm.com Abstract. Determining the language proficiency
Multi-Lingual Text Leveling Salim Roukos, Jerome Quin, and Todd Ward IBM T. J. Watson Research Center, Yorktown Heights, NY 10598 {roukos,jlquinn,tward}@us.ibm.com Abstract. Determining the language proficiency
Beyond the Pipeline: Discrete Optimization in NLP
 Beyond the Pipeline: Discrete Optimization in NLP Tomasz Marciniak and Michael Strube EML Research ggmbh Schloss-Wolfsbrunnenweg 33 69118 Heidelberg, Germany http://www.eml-research.de/nlp Abstract We
Beyond the Pipeline: Discrete Optimization in NLP Tomasz Marciniak and Michael Strube EML Research ggmbh Schloss-Wolfsbrunnenweg 33 69118 Heidelberg, Germany http://www.eml-research.de/nlp Abstract We
Rule Learning With Negation: Issues Regarding Effectiveness
 Rule Learning With Negation: Issues Regarding Effectiveness S. Chua, F. Coenen, G. Malcolm University of Liverpool Department of Computer Science, Ashton Building, Ashton Street, L69 3BX Liverpool, United
Rule Learning With Negation: Issues Regarding Effectiveness S. Chua, F. Coenen, G. Malcolm University of Liverpool Department of Computer Science, Ashton Building, Ashton Street, L69 3BX Liverpool, United
UNIVERSITY OF OSLO Department of Informatics. Dialog Act Recognition using Dependency Features. Master s thesis. Sindre Wetjen
 UNIVERSITY OF OSLO Department of Informatics Dialog Act Recognition using Dependency Features Master s thesis Sindre Wetjen November 15, 2013 Acknowledgments First I want to thank my supervisors Lilja
UNIVERSITY OF OSLO Department of Informatics Dialog Act Recognition using Dependency Features Master s thesis Sindre Wetjen November 15, 2013 Acknowledgments First I want to thank my supervisors Lilja
Proof Theory for Syntacticians
 Department of Linguistics Ohio State University Syntax 2 (Linguistics 602.02) January 5, 2012 Logics for Linguistics Many different kinds of logic are directly applicable to formalizing theories in syntax
Department of Linguistics Ohio State University Syntax 2 (Linguistics 602.02) January 5, 2012 Logics for Linguistics Many different kinds of logic are directly applicable to formalizing theories in syntax
Grade 2: Using a Number Line to Order and Compare Numbers Place Value Horizontal Content Strand
 Grade 2: Using a Number Line to Order and Compare Numbers Place Value Horizontal Content Strand Texas Essential Knowledge and Skills (TEKS): (2.1) Number, operation, and quantitative reasoning. The student
Grade 2: Using a Number Line to Order and Compare Numbers Place Value Horizontal Content Strand Texas Essential Knowledge and Skills (TEKS): (2.1) Number, operation, and quantitative reasoning. The student
Airplane Rescue: Social Studies. LEGO, the LEGO logo, and WEDO are trademarks of the LEGO Group The LEGO Group.
 Airplane Rescue: Social Studies LEGO, the LEGO logo, and WEDO are trademarks of the LEGO Group. 2010 The LEGO Group. Lesson Overview The students will discuss ways that people use land and their physical
Airplane Rescue: Social Studies LEGO, the LEGO logo, and WEDO are trademarks of the LEGO Group. 2010 The LEGO Group. Lesson Overview The students will discuss ways that people use land and their physical
Evidence for Reliability, Validity and Learning Effectiveness
 PEARSON EDUCATION Evidence for Reliability, Validity and Learning Effectiveness Introduction Pearson Knowledge Technologies has conducted a large number and wide variety of reliability and validity studies
PEARSON EDUCATION Evidence for Reliability, Validity and Learning Effectiveness Introduction Pearson Knowledge Technologies has conducted a large number and wide variety of reliability and validity studies
Artificial Neural Networks written examination
 1 (8) Institutionen för informationsteknologi Olle Gällmo Universitetsadjunkt Adress: Lägerhyddsvägen 2 Box 337 751 05 Uppsala Artificial Neural Networks written examination Monday, May 15, 2006 9 00-14
1 (8) Institutionen för informationsteknologi Olle Gällmo Universitetsadjunkt Adress: Lägerhyddsvägen 2 Box 337 751 05 Uppsala Artificial Neural Networks written examination Monday, May 15, 2006 9 00-14
Parsing of part-of-speech tagged Assamese Texts
 IJCSI International Journal of Computer Science Issues, Vol. 6, No. 1, 2009 ISSN (Online): 1694-0784 ISSN (Print): 1694-0814 28 Parsing of part-of-speech tagged Assamese Texts Mirzanur Rahman 1, Sufal
IJCSI International Journal of Computer Science Issues, Vol. 6, No. 1, 2009 ISSN (Online): 1694-0784 ISSN (Print): 1694-0814 28 Parsing of part-of-speech tagged Assamese Texts Mirzanur Rahman 1, Sufal
Copyright 2002 by the McGraw-Hill Companies, Inc.
 A group of words must pass three tests in order to be called a sentence: It must contain a subject, which tells you who or what the sentence is about Gabriella lives in Manhattan. It must contain a predicate,
A group of words must pass three tests in order to be called a sentence: It must contain a subject, which tells you who or what the sentence is about Gabriella lives in Manhattan. It must contain a predicate,
Analysis of Emotion Recognition System through Speech Signal Using KNN & GMM Classifier
 IOSR Journal of Electronics and Communication Engineering (IOSR-JECE) e-issn: 2278-2834,p- ISSN: 2278-8735.Volume 10, Issue 2, Ver.1 (Mar - Apr.2015), PP 55-61 www.iosrjournals.org Analysis of Emotion
IOSR Journal of Electronics and Communication Engineering (IOSR-JECE) e-issn: 2278-2834,p- ISSN: 2278-8735.Volume 10, Issue 2, Ver.1 (Mar - Apr.2015), PP 55-61 www.iosrjournals.org Analysis of Emotion
Generative models and adversarial training
 Day 4 Lecture 1 Generative models and adversarial training Kevin McGuinness kevin.mcguinness@dcu.ie Research Fellow Insight Centre for Data Analytics Dublin City University What is a generative model?
Day 4 Lecture 1 Generative models and adversarial training Kevin McGuinness kevin.mcguinness@dcu.ie Research Fellow Insight Centre for Data Analytics Dublin City University What is a generative model?
Target Language Preposition Selection an Experiment with Transformation-Based Learning and Aligned Bilingual Data
 Target Language Preposition Selection an Experiment with Transformation-Based Learning and Aligned Bilingual Data Ebba Gustavii Department of Linguistics and Philology, Uppsala University, Sweden ebbag@stp.ling.uu.se
Target Language Preposition Selection an Experiment with Transformation-Based Learning and Aligned Bilingual Data Ebba Gustavii Department of Linguistics and Philology, Uppsala University, Sweden ebbag@stp.ling.uu.se
A Case-Based Approach To Imitation Learning in Robotic Agents
 A Case-Based Approach To Imitation Learning in Robotic Agents Tesca Fitzgerald, Ashok Goel School of Interactive Computing Georgia Institute of Technology, Atlanta, GA 30332, USA {tesca.fitzgerald,goel}@cc.gatech.edu
A Case-Based Approach To Imitation Learning in Robotic Agents Tesca Fitzgerald, Ashok Goel School of Interactive Computing Georgia Institute of Technology, Atlanta, GA 30332, USA {tesca.fitzgerald,goel}@cc.gatech.edu
arxiv: v1 [cs.cl] 2 Apr 2017
![arxiv: v1 [cs.cl] 2 Apr 2017](/thumbs/71/66163758.jpg "arxiv: v1 [cs.cl] 2 Apr 2017") Word-Alignment-Based Segment-Level Machine Translation Evaluation using Word Embeddings Junki Matsuo and Mamoru Komachi Graduate School of System Design, Tokyo Metropolitan University, Japan matsuo-junki@ed.tmu.ac.jp,
Word-Alignment-Based Segment-Level Machine Translation Evaluation using Word Embeddings Junki Matsuo and Mamoru Komachi Graduate School of System Design, Tokyo Metropolitan University, Japan matsuo-junki@ed.tmu.ac.jp,
Arizona s English Language Arts Standards th Grade ARIZONA DEPARTMENT OF EDUCATION HIGH ACADEMIC STANDARDS FOR STUDENTS
 Arizona s English Language Arts Standards 11-12th Grade ARIZONA DEPARTMENT OF EDUCATION HIGH ACADEMIC STANDARDS FOR STUDENTS 11 th -12 th Grade Overview Arizona s English Language Arts Standards work together
Arizona s English Language Arts Standards 11-12th Grade ARIZONA DEPARTMENT OF EDUCATION HIGH ACADEMIC STANDARDS FOR STUDENTS 11 th -12 th Grade Overview Arizona s English Language Arts Standards work together
CS 598 Natural Language Processing
 CS 598 Natural Language Processing Natural language is everywhere Natural language is everywhere Natural language is everywhere Natural language is everywhere!"#$%&'&()*+,-./012 34*5665756638/9:;< =>?@ABCDEFGHIJ5KL@
CS 598 Natural Language Processing Natural language is everywhere Natural language is everywhere Natural language is everywhere Natural language is everywhere!"#$%&'&()*+,-./012 34*5665756638/9:;< =>?@ABCDEFGHIJ5KL@
Active Learning. Yingyu Liang Computer Sciences 760 Fall
 Active Learning Yingyu Liang Computer Sciences 760 Fall 2017 http://pages.cs.wisc.edu/~yliang/cs760/ Some of the slides in these lectures have been adapted/borrowed from materials developed by Mark Craven,
Active Learning Yingyu Liang Computer Sciences 760 Fall 2017 http://pages.cs.wisc.edu/~yliang/cs760/ Some of the slides in these lectures have been adapted/borrowed from materials developed by Mark Craven,
Some Principles of Automated Natural Language Information Extraction
 Some Principles of Automated Natural Language Information Extraction Gregers Koch Department of Computer Science, Copenhagen University DIKU, Universitetsparken 1, DK-2100 Copenhagen, Denmark Abstract
Some Principles of Automated Natural Language Information Extraction Gregers Koch Department of Computer Science, Copenhagen University DIKU, Universitetsparken 1, DK-2100 Copenhagen, Denmark Abstract
The Strong Minimalist Thesis and Bounded Optimality
 The Strong Minimalist Thesis and Bounded Optimality DRAFT-IN-PROGRESS; SEND COMMENTS TO RICKL@UMICH.EDU Richard L. Lewis Department of Psychology University of Michigan 27 March 2010 1 Purpose of this
The Strong Minimalist Thesis and Bounded Optimality DRAFT-IN-PROGRESS; SEND COMMENTS TO RICKL@UMICH.EDU Richard L. Lewis Department of Psychology University of Michigan 27 March 2010 1 Purpose of this
What is a Mental Model?
 Mental Models for Program Understanding Dr. Jonathan I. Maletic Computer Science Department Kent State University What is a Mental Model? Internal (mental) representation of a real system s behavior,
Mental Models for Program Understanding Dr. Jonathan I. Maletic Computer Science Department Kent State University What is a Mental Model? Internal (mental) representation of a real system s behavior,
Towards a Machine-Learning Architecture for Lexical Functional Grammar Parsing. Grzegorz Chrupa la
 Towards a Machine-Learning Architecture for Lexical Functional Grammar Parsing Grzegorz Chrupa la A dissertation submitted in fulfilment of the requirements for the award of Doctor of Philosophy (Ph.D.)
Towards a Machine-Learning Architecture for Lexical Functional Grammar Parsing Grzegorz Chrupa la A dissertation submitted in fulfilment of the requirements for the award of Doctor of Philosophy (Ph.D.)
Evolution of Symbolisation in Chimpanzees and Neural Nets
 Evolution of Symbolisation in Chimpanzees and Neural Nets Angelo Cangelosi Centre for Neural and Adaptive Systems University of Plymouth (UK) a.cangelosi@plymouth.ac.uk Introduction Animal communication
Evolution of Symbolisation in Chimpanzees and Neural Nets Angelo Cangelosi Centre for Neural and Adaptive Systems University of Plymouth (UK) a.cangelosi@plymouth.ac.uk Introduction Animal communication
Learning Optimal Dialogue Strategies: A Case Study of a Spoken Dialogue Agent for
 Learning Optimal Dialogue Strategies: A Case Study of a Spoken Dialogue Agent for Email Marilyn A. Walker Jeanne C. Fromer Shrikanth Narayanan walker@research.att.com jeannie@ai.mit.edu shri@research.att.com
Learning Optimal Dialogue Strategies: A Case Study of a Spoken Dialogue Agent for Email Marilyn A. Walker Jeanne C. Fromer Shrikanth Narayanan walker@research.att.com jeannie@ai.mit.edu shri@research.att.com
Natural Language Processing. George Konidaris
 Natural Language Processing George Konidaris gdk@cs.brown.edu Fall 2017 Natural Language Processing Understanding spoken/written sentences in a natural language. Major area of research in AI. Why? Humans
Natural Language Processing George Konidaris gdk@cs.brown.edu Fall 2017 Natural Language Processing Understanding spoken/written sentences in a natural language. Major area of research in AI. Why? Humans
Approaches to control phenomena handout Obligatory control and morphological case: Icelandic and Basque
 Approaches to control phenomena handout 6 5.4 Obligatory control and morphological case: Icelandic and Basque Icelandinc quirky case (displaying properties of both structural and inherent case: lexically
Approaches to control phenomena handout 6 5.4 Obligatory control and morphological case: Icelandic and Basque Icelandinc quirky case (displaying properties of both structural and inherent case: lexically
TRANSFER LEARNING IN MIR: SHARING LEARNED LATENT REPRESENTATIONS FOR MUSIC AUDIO CLASSIFICATION AND SIMILARITY
 TRANSFER LEARNING IN MIR: SHARING LEARNED LATENT REPRESENTATIONS FOR MUSIC AUDIO CLASSIFICATION AND SIMILARITY Philippe Hamel, Matthew E. P. Davies, Kazuyoshi Yoshii and Masataka Goto National Institute
TRANSFER LEARNING IN MIR: SHARING LEARNED LATENT REPRESENTATIONS FOR MUSIC AUDIO CLASSIFICATION AND SIMILARITY Philippe Hamel, Matthew E. P. Davies, Kazuyoshi Yoshii and Masataka Goto National Institute
Language Acquisition Chart
 Language Acquisition Chart This chart was designed to help teachers better understand the process of second language acquisition. Please use this chart as a resource for learning more about the way people
Language Acquisition Chart This chart was designed to help teachers better understand the process of second language acquisition. Please use this chart as a resource for learning more about the way people
CSL465/603 - Machine Learning
 CSL465/603 - Machine Learning Fall 2016 Narayanan C Krishnan ckn@iitrpr.ac.in Introduction CSL465/603 - Machine Learning 1 Administrative Trivia Course Structure 3-0-2 Lecture Timings Monday 9.55-10.45am
CSL465/603 - Machine Learning Fall 2016 Narayanan C Krishnan ckn@iitrpr.ac.in Introduction CSL465/603 - Machine Learning 1 Administrative Trivia Course Structure 3-0-2 Lecture Timings Monday 9.55-10.45am
Copyright Corwin 2015
 2 Defining Essential Learnings How do I find clarity in a sea of standards? For students truly to be able to take responsibility for their learning, both teacher and students need to be very clear about
2 Defining Essential Learnings How do I find clarity in a sea of standards? For students truly to be able to take responsibility for their learning, both teacher and students need to be very clear about
Modeling Attachment Decisions with a Probabilistic Parser: The Case of Head Final Structures
 Modeling Attachment Decisions with a Probabilistic Parser: The Case of Head Final Structures Ulrike Baldewein (ulrike@coli.uni-sb.de) Computational Psycholinguistics, Saarland University D-66041 Saarbrücken,
Modeling Attachment Decisions with a Probabilistic Parser: The Case of Head Final Structures Ulrike Baldewein (ulrike@coli.uni-sb.de) Computational Psycholinguistics, Saarland University D-66041 Saarbrücken,
Learning Computational Grammars
 Learning Computational Grammars John Nerbonne, Anja Belz, Nicola Cancedda, Hervé Déjean, James Hammerton, Rob Koeling, Stasinos Konstantopoulos, Miles Osborne, Franck Thollard and Erik Tjong Kim Sang Abstract
Learning Computational Grammars John Nerbonne, Anja Belz, Nicola Cancedda, Hervé Déjean, James Hammerton, Rob Koeling, Stasinos Konstantopoulos, Miles Osborne, Franck Thollard and Erik Tjong Kim Sang Abstract
Linguistics. Undergraduate. Departmental Honors. Graduate. Faculty. Linguistics 1
 Linguistics 1 Linguistics Matthew Gordon, Chair Interdepartmental Program in the College of Arts and Science 223 Tate Hall (573) 882-6421 gordonmj@missouri.edu Kibby Smith, Advisor Office of Multidisciplinary
Linguistics 1 Linguistics Matthew Gordon, Chair Interdepartmental Program in the College of Arts and Science 223 Tate Hall (573) 882-6421 gordonmj@missouri.edu Kibby Smith, Advisor Office of Multidisciplinary
B. How to write a research paper
 From: Nikolaus Correll. "Introduction to Autonomous Robots", ISBN 1493773070, CC-ND 3.0 B. How to write a research paper The final deliverable of a robotics class often is a write-up on a research project,
From: Nikolaus Correll. "Introduction to Autonomous Robots", ISBN 1493773070, CC-ND 3.0 B. How to write a research paper The final deliverable of a robotics class often is a write-up on a research project,
BYLINE [Heng Ji, Computer Science Department, New York University,
 INFORMATION EXTRACTION BYLINE [Heng Ji, Computer Science Department, New York University, hengji@cs.nyu.edu] SYNONYMS NONE DEFINITION Information Extraction (IE) is a task of extracting pre-specified types
INFORMATION EXTRACTION BYLINE [Heng Ji, Computer Science Department, New York University, hengji@cs.nyu.edu] SYNONYMS NONE DEFINITION Information Extraction (IE) is a task of extracting pre-specified types
Using Semantic Relations to Refine Coreference Decisions
 Using Semantic Relations to Refine Coreference Decisions Heng Ji David Westbrook Ralph Grishman Department of Computer Science New York University New York, NY, 10003, USA hengji@cs.nyu.edu westbroo@cs.nyu.edu
Using Semantic Relations to Refine Coreference Decisions Heng Ji David Westbrook Ralph Grishman Department of Computer Science New York University New York, NY, 10003, USA hengji@cs.nyu.edu westbroo@cs.nyu.edu
Linking object names and object categories: Words (but not tones) facilitate object categorization in 6- and 12-month-olds
 facilitate object categorization in 6- and 12-month-olds") Linking object names and object categories: Words (but not tones) facilitate object categorization in 6- and 12-month-olds Anne L. Fulkerson 1, Sandra R. Waxman 2, and Jennifer M. Seymour 1 1 University
Linking object names and object categories: Words (but not tones) facilitate object categorization in 6- and 12-month-olds Anne L. Fulkerson 1, Sandra R. Waxman 2, and Jennifer M. Seymour 1 1 University
Enhancing Unlexicalized Parsing Performance using a Wide Coverage Lexicon, Fuzzy Tag-set Mapping, and EM-HMM-based Lexical Probabilities
 Enhancing Unlexicalized Parsing Performance using a Wide Coverage Lexicon, Fuzzy Tag-set Mapping, and EM-HMM-based Lexical Probabilities Yoav Goldberg Reut Tsarfaty Meni Adler Michael Elhadad Ben Gurion
Enhancing Unlexicalized Parsing Performance using a Wide Coverage Lexicon, Fuzzy Tag-set Mapping, and EM-HMM-based Lexical Probabilities Yoav Goldberg Reut Tsarfaty Meni Adler Michael Elhadad Ben Gurion
Achievement Level Descriptors for American Literature and Composition
 Achievement Level Descriptors for American Literature and Composition Georgia Department of Education September 2015 All Rights Reserved Achievement Levels and Achievement Level Descriptors With the implementation
Achievement Level Descriptors for American Literature and Composition Georgia Department of Education September 2015 All Rights Reserved Achievement Levels and Achievement Level Descriptors With the implementation
On document relevance and lexical cohesion between query terms
 Information Processing and Management 42 (2006) 1230 1247 www.elsevier.com/locate/infoproman On document relevance and lexical cohesion between query terms Olga Vechtomova a, *, Murat Karamuftuoglu b,
Information Processing and Management 42 (2006) 1230 1247 www.elsevier.com/locate/infoproman On document relevance and lexical cohesion between query terms Olga Vechtomova a, *, Murat Karamuftuoglu b,
PART C: ENERGIZERS & TEAM-BUILDING ACTIVITIES TO SUPPORT YOUTH-ADULT PARTNERSHIPS
 PART C: ENERGIZERS & TEAM-BUILDING ACTIVITIES TO SUPPORT YOUTH-ADULT PARTNERSHIPS The following energizers and team-building activities can help strengthen the core team and help the participants get to
PART C: ENERGIZERS & TEAM-BUILDING ACTIVITIES TO SUPPORT YOUTH-ADULT PARTNERSHIPS The following energizers and team-building activities can help strengthen the core team and help the participants get to
Spoken Language Parsing Using Phrase-Level Grammars and Trainable Classifiers
 Spoken Language Parsing Using Phrase-Level Grammars and Trainable Classifiers Chad Langley, Alon Lavie, Lori Levin, Dorcas Wallace, Donna Gates, and Kay Peterson Language Technologies Institute Carnegie
Spoken Language Parsing Using Phrase-Level Grammars and Trainable Classifiers Chad Langley, Alon Lavie, Lori Levin, Dorcas Wallace, Donna Gates, and Kay Peterson Language Technologies Institute Carnegie
Morphosyntactic and Referential Cues to the Identification of Generic Statements
 Morphosyntactic and Referential Cues to the Identification of Generic Statements Phil Crone pcrone@stanford.edu Department of Linguistics Stanford University Michael C. Frank mcfrank@stanford.edu Department
Morphosyntactic and Referential Cues to the Identification of Generic Statements Phil Crone pcrone@stanford.edu Department of Linguistics Stanford University Michael C. Frank mcfrank@stanford.edu Department
Lecture 10: Reinforcement Learning
 Lecture 1: Reinforcement Learning Cognitive Systems II - Machine Learning SS 25 Part III: Learning Programs and Strategies Q Learning, Dynamic Programming Lecture 1: Reinforcement Learning p. Motivation
Lecture 1: Reinforcement Learning Cognitive Systems II - Machine Learning SS 25 Part III: Learning Programs and Strategies Q Learning, Dynamic Programming Lecture 1: Reinforcement Learning p. Motivation
CS 446: Machine Learning
 CS 446: Machine Learning Introduction to LBJava: a Learning Based Programming Language Writing classifiers Christos Christodoulopoulos Parisa Kordjamshidi Motivation 2 Motivation You still have not learnt
CS 446: Machine Learning Introduction to LBJava: a Learning Based Programming Language Writing classifiers Christos Christodoulopoulos Parisa Kordjamshidi Motivation 2 Motivation You still have not learnt
Rule Learning with Negation: Issues Regarding Effectiveness
 Rule Learning with Negation: Issues Regarding Effectiveness Stephanie Chua, Frans Coenen, and Grant Malcolm University of Liverpool Department of Computer Science, Ashton Building, Ashton Street, L69 3BX
Rule Learning with Negation: Issues Regarding Effectiveness Stephanie Chua, Frans Coenen, and Grant Malcolm University of Liverpool Department of Computer Science, Ashton Building, Ashton Street, L69 3BX
The Internet as a Normative Corpus: Grammar Checking with a Search Engine
 The Internet as a Normative Corpus: Grammar Checking with a Search Engine Jonas Sjöbergh KTH Nada SE-100 44 Stockholm, Sweden jsh@nada.kth.se Abstract In this paper some methods using the Internet as a
The Internet as a Normative Corpus: Grammar Checking with a Search Engine Jonas Sjöbergh KTH Nada SE-100 44 Stockholm, Sweden jsh@nada.kth.se Abstract In this paper some methods using the Internet as a
Learning Methods in Multilingual Speech Recognition
 Learning Methods in Multilingual Speech Recognition Hui Lin Department of Electrical Engineering University of Washington Seattle, WA 98125 linhui@u.washington.edu Li Deng, Jasha Droppo, Dong Yu, and Alex
Learning Methods in Multilingual Speech Recognition Hui Lin Department of Electrical Engineering University of Washington Seattle, WA 98125 linhui@u.washington.edu Li Deng, Jasha Droppo, Dong Yu, and Alex
The College Board Redesigned SAT Grade 12
 A Correlation of, 2017 To the Redesigned SAT Introduction This document demonstrates how myperspectives English Language Arts meets the Reading, Writing and Language and Essay Domains of Redesigned SAT.
A Correlation of, 2017 To the Redesigned SAT Introduction This document demonstrates how myperspectives English Language Arts meets the Reading, Writing and Language and Essay Domains of Redesigned SAT.
A basic cognitive system for interactive continuous learning of visual concepts
 A basic cognitive system for interactive continuous learning of visual concepts Danijel Skočaj, Miroslav Janíček, Matej Kristan, Geert-Jan M. Kruijff, Aleš Leonardis, Pierre Lison, Alen Vrečko, and Michael
A basic cognitive system for interactive continuous learning of visual concepts Danijel Skočaj, Miroslav Janíček, Matej Kristan, Geert-Jan M. Kruijff, Aleš Leonardis, Pierre Lison, Alen Vrečko, and Michael
ReinForest: Multi-Domain Dialogue Management Using Hierarchical Policies and Knowledge Ontology
 ReinForest: Multi-Domain Dialogue Management Using Hierarchical Policies and Knowledge Ontology Tiancheng Zhao CMU-LTI-16-006 Language Technologies Institute School of Computer Science Carnegie Mellon
ReinForest: Multi-Domain Dialogue Management Using Hierarchical Policies and Knowledge Ontology Tiancheng Zhao CMU-LTI-16-006 Language Technologies Institute School of Computer Science Carnegie Mellon
Distant Supervised Relation Extraction with Wikipedia and Freebase
 Distant Supervised Relation Extraction with Wikipedia and Freebase Marcel Ackermann TU Darmstadt ackermann@tk.informatik.tu-darmstadt.de Abstract In this paper we discuss a new approach to extract relational
Distant Supervised Relation Extraction with Wikipedia and Freebase Marcel Ackermann TU Darmstadt ackermann@tk.informatik.tu-darmstadt.de Abstract In this paper we discuss a new approach to extract relational
An Interactive Intelligent Language Tutor Over The Internet
 An Interactive Intelligent Language Tutor Over The Internet Trude Heift Linguistics Department and Language Learning Centre Simon Fraser University, B.C. Canada V5A1S6 E-mail: heift@sfu.ca Abstract: This
An Interactive Intelligent Language Tutor Over The Internet Trude Heift Linguistics Department and Language Learning Centre Simon Fraser University, B.C. Canada V5A1S6 E-mail: heift@sfu.ca Abstract: This
CEFR Overall Illustrative English Proficiency Scales
 CEFR Overall Illustrative English Proficiency s CEFR CEFR OVERALL ORAL PRODUCTION Has a good command of idiomatic expressions and colloquialisms with awareness of connotative levels of meaning. Can convey
CEFR Overall Illustrative English Proficiency s CEFR CEFR OVERALL ORAL PRODUCTION Has a good command of idiomatic expressions and colloquialisms with awareness of connotative levels of meaning. Can convey
Introduction to HPSG. Introduction. Historical Overview. The HPSG architecture. Signature. Linguistic Objects. Descriptions.
 to as a linguistic theory to to a member of the family of linguistic frameworks that are called generative grammars a grammar which is formalized to a high degree and thus makes exact predictions about
to as a linguistic theory to to a member of the family of linguistic frameworks that are called generative grammars a grammar which is formalized to a high degree and thus makes exact predictions about
1 st Quarter (September, October, November) August/September Strand Topic Standard Notes Reading for Literature
 August/September Strand Topic Standard Notes Reading for Literature") 1 st Grade Curriculum Map Common Core Standards Language Arts 2013 2014 1 st Quarter (September, October, November) August/September Strand Topic Standard Notes Reading for Literature Key Ideas and Details
1 st Grade Curriculum Map Common Core Standards Language Arts 2013 2014 1 st Quarter (September, October, November) August/September Strand Topic Standard Notes Reading for Literature Key Ideas and Details
Hardhatting in a Geo-World
 Hardhatting in a Geo-World TM Developed and Published by AIMS Education Foundation This book contains materials developed by the AIMS Education Foundation. AIMS (Activities Integrating Mathematics and
Hardhatting in a Geo-World TM Developed and Published by AIMS Education Foundation This book contains materials developed by the AIMS Education Foundation. AIMS (Activities Integrating Mathematics and
This publication is also available for download at
 Sourced from SATs-Papers.co.uk Crown copyright 2012 STA/12/5595 ISBN 978 1 4459 5227 7 You may re-use this information (excluding logos) free of charge in any format or medium, under the terms of the Open
Sourced from SATs-Papers.co.uk Crown copyright 2012 STA/12/5595 ISBN 978 1 4459 5227 7 You may re-use this information (excluding logos) free of charge in any format or medium, under the terms of the Open