Deep Reinforcement Learning
|
|
|
- Antony Horn
- 5 years ago
- Views:
Transcription
1 Deep Reinforcement Learning Sanket Lokegaonkar Advanced Computer Vision (ECE 6554)
2 Outline The Why? Gliding Over All : An Introduction Classical RL DQN-Era Playing Atari with Deep Reinforcement Learning [2013] 7 Atari Games Human-level control through deep reinforcement learning. [2015] 49 Atari Games Brave New World
3 The Why? : Task Learning to behave optimally in a changing world Characteristics of the Task: RL: No Supervisor ( Only Rewards) Delayed Feedback Non I.I.D data Previous action affects the next state Learning by Interaction and your choices Time-travelling back to the moment: Only to Live Again Reminds you of something: Life - (Time Travelling Part)
4 The Why?: Hardness Imagine playing a new game whose rules you don t know; after a hundred hundred or so moves, your opponent announces, You lose. Russell and Norvig Introduction to Artificial Intelligence

5 The Why?: Why do RL? So that we could move away from rule-based systems!! So that we could train quadcopters to fly and move! So that you could sip coffee all day and your bot will do the trading for you! Or Create intelligent robots for dumb tasks


6 Gliding Over All: An Introduction Credits: David Silver

7 Environment and Agent At each step t, the agent The environment, Executes action At Receives observation Ot Receives scalar reward Rt Receives action At Emits observation Ot+1 Emits scalar reward Rt+1 t increments in every step Credits: David Silver

8 Markov Decision Process Credits: Andrej Karpathy s blog
9 Markov Decision Process (MDP) Set of states S Set of actions A State transition probabilities p(s s, a). This is the probability distribution over the state space given we take action a in state s Discount factor γ in [0, 1] Reward function R: S x A -> set of real numbers For simplicity, assume discrete rewards Finite MDP if both S and A are finite

10 State Transition Probabilities Suppose the reward function is discrete and maps from S x A to W The state transition probability or probability of transitioning to state s given current state s and action a in that state is given by:
11 Expected Rewards The expected reward for a given state-action pair is given by:
12 Policy and Value Function Policy Behavior Function Mapping from state to action Deterministic Policy : a=\pi (s) Stochastic Policy: (a s) = Pr [ At = a St =s] Value Function Prediction of total future Reward under a policy Captures goodness/badness of states Can be used to greedily select among the actions v (s) = E [R t+1 + Rt R t+3 St =s] Credits: ICML DRL Tutorial
13 Action-Value Function (Q -function) Expected Return starting from state s, taking action A and then following policy with as the discounting factor. Goodness of state given an action a Credits: ICML DRL Tutorial
14 Optimal Action-Value Function Action -Value Function Equivalent Representation (Bellman Equation): Optimal Value Function: Q* (s,a) = max Q (s,a) If we know the optimal action-value function, the optimal policy would be: Q (s,a) = E [ Rs + γ Q (s,a ) ] * ( s) = argmax a Q*(s,a) Optimal value maximizes over all decisions: Q* (s,a) = E [ Rs + γ maxa Q (s,a ) ] Credits: ICML DRL Tutorial
15 Bellman Equation (1) The equation expresses the relationship between the value of a state s and the values of its successor states The value of the next state must equal the discounted value of the expected next state, plus the reward expected along the way
16 Bellman Equation (2) The value of state s is the expected value of the sum of time-discounted rewards (starting at current state) given current state s This is expected value of r plus the sum of time-discounted rewards (starting at successor state) over all successor states s and all next rewards r and over all possible actions a in current state s

17 DEMO Credits: [3]
18 Approaches in RL Value -Based RL (Value Iteration) (Model Free) Policy -Based RL (Policy Iteration) (Model Free) Estimate the value of optimal value function Q* (s,a) Search for the optimal policy * ( s) Model-Based RL Learn a model of the environment Plan using the model Deep networks are used to approximate the functions
19 Model-free versus Model-based A model of the environment allows inferences to be made about how the environment will behave Example: Given a state and an action to be taken while in that state, the model could predict the next state and the next reward Models are used for planning, which means deciding on a course of action by considering possible future situations before they are experienced Model-based methods use models and planning. Think of this as modelling the dynamics p(s s, a) Model-free methods learn exclusively from trial-and-error (i.e. no modelling of the environment) We focus on model-free methods today:
20 On-policy versus Off-policy An on-policy agent learns only about the policy that it is executing An off-policy agent learns about a policy or policies different from the one that it is executing
21 What is TD learning? Temporal-Difference learning = TD learning The prediction problem is that of estimating the value function for a policy π The control problem is the problem of finding an optimal policy π* Given some experience following a policy π, update estimate v of vπ for non-terminal states occurring in that experience Given current step t, TD methods wait until the next time step to update V(St) Learn from partial returns
22 Epsilon-greedy Policy At each time step, the agent selects an action The agent follows the greedy strategy with probability 1 epsilon The agent selects a random action with probability epsilon With Q-learning, the greedy strategy is the action a that maximises Q given St+1
23 Q-learning Off-policy TD Control Similar to SARSA but off-policy updates The learned action-value function Q directly approximates the optimal action-value function q* independent of the policy being followed In update rule, choose action a that maximises Q given St+1 and use the resulting Q-value (i.e. estimated value given by optimal action-value function) plus the observed reward as the target This method is off-policy because we do not have a fixed policy that maps from states to actions. This is why At+1 is not used in the update rule
24 Deep Q-Networks (DQN) Introduced deep reinforcement learning It is common to use a function approximator Q(s, a; θ) to approximate the action-value function in Q-learning Deep Q-Networks is Q-learning with a deep neural network function approximator called the Q-network Discrete and finite set of actions A Example: Breakout has 3 actions move left, move right, no movement Uses epsilon-greedy policy to select actions
25 Q-Networks Core idea: We want the neural network to learn a non-linear hierarchy of features or feature representation that gives accurate Q-value estimates The neural network has a separate output unit for each possible action, which gives the Q-value estimate for that action given the input state The neural network is trained using mini-batch stochastic gradient updates and experience replay
26 State representation It is difficult to give the neural network a sequence of arbitrary length as input Use fixed length representation of sequence/history produced by a function ϕ(st) Example: The last 4 image frames in the sequence of Breakout gameplay
27 Q-Network Training Sample random mini-batch of experience tuples uniformly at random from D Similar to Q-learning update rule but: Use mini-batch stochastic gradient updates The gradient of the loss function for a given iteration with respect to the parameter θi is the difference between the target value and the actual value is multiplied by the gradient of the Q function approximator Q(s, a; θ) with respect to that specific parameter Use the gradient of the loss function to update the Q function approximator
28 Value-based RL Q-function is represented as Q-network with weights : Q(s,a,w) = Q*(s,a)
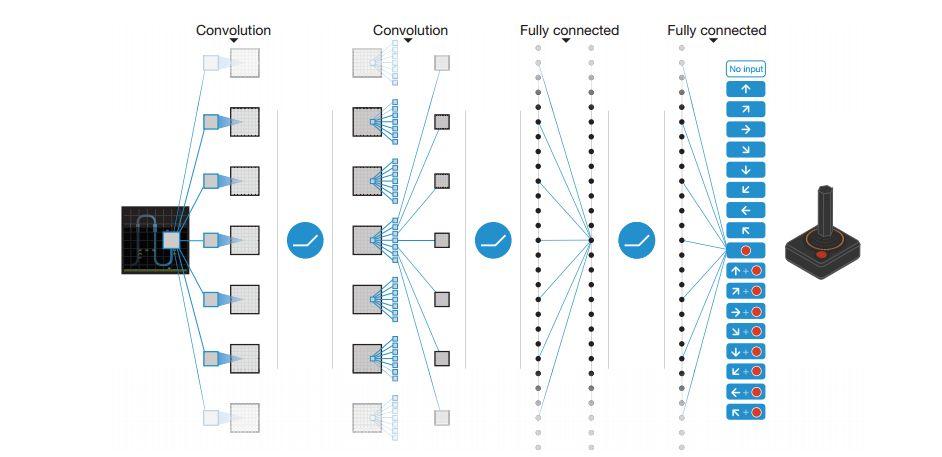
29 Playing Atari with Deep Reinforcement Learning Problem Statement: Input: Output: Raw Atari Frames 210 x160 pixel with 128-color pallete Possible Action to be taken Goal /Objective: Optimal Policy with Maximal Reward

30 Playing Atari with Deep Reinforcement Learning Architecture:

31 Playing Atari with Deep Reinforcement Learning Architecture:

32 Playing Atari with Deep Reinforcement Learning Architecture:
33 Playing Atari with Deep Reinforcement Learning Algorithm:
34 Playing Atari with Deep Reinforcement Learning MSE Loss with DQN: Issues with Convergence of DQN: Non I.I.D data Oscillating policies with slight variations of Q-values Gradient descent can be large and unstable
35 Solutions to the Issues: Non-IID data Experience Replay (for handling non-iid data) Build a memory storing N pairs of agent s experience i.e (st,at,rt+1,st+1) Sample random minibatch experience from the memory Breaks correlation ~ brings back to iid domain
36 Solution to the Issues: How to prevent oscillations Fix parameters used in Q-learning target Compute Q-learning targets wrt old fixed parameters θ Loss Minimization Equation between Q-network and Q-learning targets L(θ) = Es,a,r,s ~ D [ r + ᵞ maxa Q(s,a,θ) ] Periodically update fixed parameters θ-
37 Solution to the Issues: Unstable Gradient Clipping Rewards between [-1,1] Limits the scale of the derivatives Easier to use same learning rate over different Atari Games Disadvantage: Invariant to different magnitudes of rewards
38 Evaluations Atari Games Tried: Beam Rider Breakout Pong Q*bert Seaquest Space Invaders
39 Evaluations Metrics: Average Total Reward Metric Average action-value Collect a fixed set of states by running a random policy before training starts Average of the maximum predicted Q for these states Optimization: RMSProp with minibatches of size 32 Behavior policy ϵ greedy (Annealed from 1 to 0.1 and fixed to 0.1 later)
40 Evaluations

41 Evaluations Average Total Reward Best Performing Episode
42 Analysis Strengths: Q-learning over non-linear function approximators End-to-End Learning over multiple games SGD Training Seminal paper Weakness: DQN limited to finite discrete actions Long Training Reward Clipping
43 Human-level control through deep reinforcement learning Extending the DQN architecture to play 49 Atari 2600 arcade games No pretraining No game-specific training State: Transitions from 4 frames : Experience Replay Actions -18: 9 directions of joystick 9 directions + button Reward - Game Score
44 Architecture
45 Stats over 49 games

46 T-SNE Embedding ( Last Hidden Layer)
47 Analysis Strengths: End-to-End Learning over multiple games Beats human performance on most of the games Richer Rewards Weakness: Long Training DQN limited to finite discrete actions
48 Brave New World
49 Optimizations on DQN Since Then Double DQN: Remove Upward bias caused by maxa Q(s,a, w) Prioritized replay : Weight experience according to TD-error (suprise) Current Q-network w: Used to select actions Older Q-network w-: Used to evaluate actions Store experience in priority queue according to DQN error Asynchronous RL Joint Training using Parameter Sharing on Distributed Scale GORILA Credits: ICML DRL Tutorial
50 What are Policy Gradient Methods? Before: Learn the values of actions and then select actions based on their estimated action-values. The policy was generated directly from the value function We want to learn a parameterised policy that can select actions without consulting a value function. The parameters of the policy are called policy weights A value function may be used to learn the policy weights but this is not required for action selection Policy gradient methods are methods for learning the policy weights using the gradient of some performance measure with respect to the policy weights Policy gradient methods seek to maximise performance and so the policy weights are updated using gradient ascent
51 Policy-based Reinforcement Learning Search directly for the optimal policy π* Can use any parametric supervised machine learning model to learn policies π(a s; θ) where θ represents the learned parameters Recall that the optimal policy is the policy that achieves maximum future return
52 Policy-Based RL Represent policies by deep networks instead of Q-function Objective function for the network a = π( a s, u) Stochastic Policies A = π( s, u ) Deterministic Policies where u is the parameters of the deep network L(u) = E [ r 1 + γr 2 + γ2r 3 π(., u ) ] SGD Optimization Allows Continuous and Discrete Control Known to get stuck in Local minima Credits: ICML DRL Tutorial
53 Algorithms in Policy-Based RL REINFORCE while (true) run_episode(policy) update(policy) end; Actor-Critic Episodic updates Maximize the loss of expected reward under the objective Updates at each step Critic approximates the value function Actor approximates the policy Asynchronous Advantage Function Actor-Critic Uses Advantage Function Estimate for state-actuib. A(s,a,w) = Q(s,a,w) -V(s) Replacing the need of replay memory by using parallel agents running on CPU Relies on different exploration behavior of the parallel agents Outperforms the conventional method Credits: ICML DRL Tutorial
54 What is Asynchronous Reinforcement Learning? Use asynchronous gradient descent to optimise controllers This is useful for deep reinforcement learning where the controllers are deep neural networks, which take a long time to train Asynchronous gradient descent speeds up the learning process Can use one multi-core CPU to train deep neural networks asynchronously instead of multiple GPUs
55 Parallelism (1) Asynchronously execute multiple agents in parallel on multiple instances of the environment This parallelism decorrelates the agents data into a more stationary process since at any given time-step, the agents will be experiencing a variety of different states This approach enables a larger spectrum of fundamental on-policy and off-policy reinforcement learning algorithms to be applied robustly and effectively using deep neural networks Use asynchronous actor-learners (i.e. agents). Think of each actor-learner as a thread Run everything on a single multi-core CPU to avoid communication costs of sending gradients and parameters
56 Parallelism (2) Multiple actor-learners running in parallel are likely to be exploring different parts of the environment We can explicitly use different exploration policies in each actor-learner to maximise this diversity By running different exploration policies in different threads, the overall changes made to the parameters by multiple actor-learners applying updates in parallel are less likely to be correlated in time than a single agent applying online updates
57 No Experience Replay No need for a replay memory. We instead rely on parallel actors employing different exploration policies to perform the stabilising role undertaken by experience replay in the DQN training algorithm Since we no longer rely on experience replay for stabilising learning, we are able to use on-policy reinforcement learning methods to train neural networks in a stable way

58 Video Demo : A3C Labryinth

59 Video Demo : DQN Doom
60 Scope / Future Multi-agent Deep RL Share Parameters!!! (Naive approach) Hierarchical Deep Reinforcement Learning Road to General AI!
61 Quotes from the Maestro If intelligence was a cake, unsupervised learning would be the cake, supervised learning would be the icing on the cake, and reinforcement learning would be the cherry on the cake. -Yann Lecun
62 Reference Zone ICML Deep RL Tutorial : Andrej Karpathy s blog: Playing Atari with Deep Reinforcement Learning. V. Mnih, K. Kavukcuoglu, D. Silver, A. Graves, I. Antonoglou, D. Wierstra, M. Riedmiller, NIPS workshop 2013 Human-level control through deep reinforcement learning. Mnih et al. Nature
Lecture 10: Reinforcement Learning
 Lecture 1: Reinforcement Learning Cognitive Systems II - Machine Learning SS 25 Part III: Learning Programs and Strategies Q Learning, Dynamic Programming Lecture 1: Reinforcement Learning p. Motivation
Lecture 1: Reinforcement Learning Cognitive Systems II - Machine Learning SS 25 Part III: Learning Programs and Strategies Q Learning, Dynamic Programming Lecture 1: Reinforcement Learning p. Motivation
Reinforcement Learning by Comparing Immediate Reward
 Reinforcement Learning by Comparing Immediate Reward Punit Pandey DeepshikhaPandey Dr. Shishir Kumar Abstract This paper introduces an approach to Reinforcement Learning Algorithm by comparing their immediate
Reinforcement Learning by Comparing Immediate Reward Punit Pandey DeepshikhaPandey Dr. Shishir Kumar Abstract This paper introduces an approach to Reinforcement Learning Algorithm by comparing their immediate
AI Agent for Ice Hockey Atari 2600
 AI Agent for Ice Hockey Atari 2600 Emman Kabaghe (emmank@stanford.edu) Rajarshi Roy (rroy@stanford.edu) 1 Introduction In the reinforcement learning (RL) problem an agent autonomously learns a behavior
AI Agent for Ice Hockey Atari 2600 Emman Kabaghe (emmank@stanford.edu) Rajarshi Roy (rroy@stanford.edu) 1 Introduction In the reinforcement learning (RL) problem an agent autonomously learns a behavior
Lecture 1: Machine Learning Basics
 1/69 Lecture 1: Machine Learning Basics Ali Harakeh University of Waterloo WAVE Lab ali.harakeh@uwaterloo.ca May 1, 2017 2/69 Overview 1 Learning Algorithms 2 Capacity, Overfitting, and Underfitting 3
1/69 Lecture 1: Machine Learning Basics Ali Harakeh University of Waterloo WAVE Lab ali.harakeh@uwaterloo.ca May 1, 2017 2/69 Overview 1 Learning Algorithms 2 Capacity, Overfitting, and Underfitting 3
Georgetown University at TREC 2017 Dynamic Domain Track
 Georgetown University at TREC 2017 Dynamic Domain Track Zhiwen Tang Georgetown University zt79@georgetown.edu Grace Hui Yang Georgetown University huiyang@cs.georgetown.edu Abstract TREC Dynamic Domain
Georgetown University at TREC 2017 Dynamic Domain Track Zhiwen Tang Georgetown University zt79@georgetown.edu Grace Hui Yang Georgetown University huiyang@cs.georgetown.edu Abstract TREC Dynamic Domain
LEARNING TO PLAY IN A DAY: FASTER DEEP REIN-
 LEARNING TO PLAY IN A DAY: FASTER DEEP REIN- FORCEMENT LEARNING BY OPTIMALITY TIGHTENING Frank S. He Department of Computer Science University of Illinois at Urbana-Champaign Zhejiang University frankheshibi@gmail.com
LEARNING TO PLAY IN A DAY: FASTER DEEP REIN- FORCEMENT LEARNING BY OPTIMALITY TIGHTENING Frank S. He Department of Computer Science University of Illinois at Urbana-Champaign Zhejiang University frankheshibi@gmail.com
Module 12. Machine Learning. Version 2 CSE IIT, Kharagpur
 Module 12 Machine Learning 12.1 Instructional Objective The students should understand the concept of learning systems Students should learn about different aspects of a learning system Students should
Module 12 Machine Learning 12.1 Instructional Objective The students should understand the concept of learning systems Students should learn about different aspects of a learning system Students should
Exploration. CS : Deep Reinforcement Learning Sergey Levine
 Exploration CS 294-112: Deep Reinforcement Learning Sergey Levine Class Notes 1. Homework 4 due on Wednesday 2. Project proposal feedback sent Today s Lecture 1. What is exploration? Why is it a problem?
Exploration CS 294-112: Deep Reinforcement Learning Sergey Levine Class Notes 1. Homework 4 due on Wednesday 2. Project proposal feedback sent Today s Lecture 1. What is exploration? Why is it a problem?
Artificial Neural Networks written examination
 1 (8) Institutionen för informationsteknologi Olle Gällmo Universitetsadjunkt Adress: Lägerhyddsvägen 2 Box 337 751 05 Uppsala Artificial Neural Networks written examination Monday, May 15, 2006 9 00-14
1 (8) Institutionen för informationsteknologi Olle Gällmo Universitetsadjunkt Adress: Lägerhyddsvägen 2 Box 337 751 05 Uppsala Artificial Neural Networks written examination Monday, May 15, 2006 9 00-14
Laboratorio di Intelligenza Artificiale e Robotica
 Laboratorio di Intelligenza Artificiale e Robotica A.A. 2008-2009 Outline 2 Machine Learning Unsupervised Learning Supervised Learning Reinforcement Learning Genetic Algorithms Genetics-Based Machine Learning
Laboratorio di Intelligenza Artificiale e Robotica A.A. 2008-2009 Outline 2 Machine Learning Unsupervised Learning Supervised Learning Reinforcement Learning Genetic Algorithms Genetics-Based Machine Learning
Axiom 2013 Team Description Paper
 Axiom 2013 Team Description Paper Mohammad Ghazanfari, S Omid Shirkhorshidi, Farbod Samsamipour, Hossein Rahmatizadeh Zagheli, Mohammad Mahdavi, Payam Mohajeri, S Abbas Alamolhoda Robotics Scientific Association
Axiom 2013 Team Description Paper Mohammad Ghazanfari, S Omid Shirkhorshidi, Farbod Samsamipour, Hossein Rahmatizadeh Zagheli, Mohammad Mahdavi, Payam Mohajeri, S Abbas Alamolhoda Robotics Scientific Association
ISFA2008U_120 A SCHEDULING REINFORCEMENT LEARNING ALGORITHM
 Proceedings of 28 ISFA 28 International Symposium on Flexible Automation Atlanta, GA, USA June 23-26, 28 ISFA28U_12 A SCHEDULING REINFORCEMENT LEARNING ALGORITHM Amit Gil, Helman Stern, Yael Edan, and
Proceedings of 28 ISFA 28 International Symposium on Flexible Automation Atlanta, GA, USA June 23-26, 28 ISFA28U_12 A SCHEDULING REINFORCEMENT LEARNING ALGORITHM Amit Gil, Helman Stern, Yael Edan, and
Challenges in Deep Reinforcement Learning. Sergey Levine UC Berkeley
 Challenges in Deep Reinforcement Learning Sergey Levine UC Berkeley Discuss some recent work in deep reinforcement learning Present a few major challenges Show some of our recent work toward tackling
Challenges in Deep Reinforcement Learning Sergey Levine UC Berkeley Discuss some recent work in deep reinforcement learning Present a few major challenges Show some of our recent work toward tackling
Generative models and adversarial training
 Day 4 Lecture 1 Generative models and adversarial training Kevin McGuinness kevin.mcguinness@dcu.ie Research Fellow Insight Centre for Data Analytics Dublin City University What is a generative model?
Day 4 Lecture 1 Generative models and adversarial training Kevin McGuinness kevin.mcguinness@dcu.ie Research Fellow Insight Centre for Data Analytics Dublin City University What is a generative model?
CSL465/603 - Machine Learning
 CSL465/603 - Machine Learning Fall 2016 Narayanan C Krishnan ckn@iitrpr.ac.in Introduction CSL465/603 - Machine Learning 1 Administrative Trivia Course Structure 3-0-2 Lecture Timings Monday 9.55-10.45am
CSL465/603 - Machine Learning Fall 2016 Narayanan C Krishnan ckn@iitrpr.ac.in Introduction CSL465/603 - Machine Learning 1 Administrative Trivia Course Structure 3-0-2 Lecture Timings Monday 9.55-10.45am
Unsupervised Learning of Word Semantic Embedding using the Deep Structured Semantic Model
 Unsupervised Learning of Word Semantic Embedding using the Deep Structured Semantic Model Xinying Song, Xiaodong He, Jianfeng Gao, Li Deng Microsoft Research, One Microsoft Way, Redmond, WA 98052, U.S.A.
Unsupervised Learning of Word Semantic Embedding using the Deep Structured Semantic Model Xinying Song, Xiaodong He, Jianfeng Gao, Li Deng Microsoft Research, One Microsoft Way, Redmond, WA 98052, U.S.A.
TD(λ) and Q-Learning Based Ludo Players
 and Q-Learning Based Ludo Players") TD(λ) and Q-Learning Based Ludo Players Majed Alhajry, Faisal Alvi, Member, IEEE and Moataz Ahmed Abstract Reinforcement learning is a popular machine learning technique whose inherent self-learning ability
TD(λ) and Q-Learning Based Ludo Players Majed Alhajry, Faisal Alvi, Member, IEEE and Moataz Ahmed Abstract Reinforcement learning is a popular machine learning technique whose inherent self-learning ability
Python Machine Learning
 Python Machine Learning Unlock deeper insights into machine learning with this vital guide to cuttingedge predictive analytics Sebastian Raschka [ PUBLISHING 1 open source I community experience distilled
Python Machine Learning Unlock deeper insights into machine learning with this vital guide to cuttingedge predictive analytics Sebastian Raschka [ PUBLISHING 1 open source I community experience distilled
arxiv: v1 [cs.lg] 15 Jun 2015
![arxiv: v1 [cs.lg] 15 Jun 2015](/thumbs/71/66112896.jpg "arxiv: v1 [cs.lg] 15 Jun 2015") Dual Memory Architectures for Fast Deep Learning of Stream Data via an Online-Incremental-Transfer Strategy arxiv:1506.04477v1 [cs.lg] 15 Jun 2015 Sang-Woo Lee Min-Oh Heo School of Computer Science and
Dual Memory Architectures for Fast Deep Learning of Stream Data via an Online-Incremental-Transfer Strategy arxiv:1506.04477v1 [cs.lg] 15 Jun 2015 Sang-Woo Lee Min-Oh Heo School of Computer Science and
Laboratorio di Intelligenza Artificiale e Robotica
 Laboratorio di Intelligenza Artificiale e Robotica A.A. 2008-2009 Outline 2 Machine Learning Unsupervised Learning Supervised Learning Reinforcement Learning Genetic Algorithms Genetics-Based Machine Learning
Laboratorio di Intelligenza Artificiale e Robotica A.A. 2008-2009 Outline 2 Machine Learning Unsupervised Learning Supervised Learning Reinforcement Learning Genetic Algorithms Genetics-Based Machine Learning
FF+FPG: Guiding a Policy-Gradient Planner
 FF+FPG: Guiding a Policy-Gradient Planner Olivier Buffet LAAS-CNRS University of Toulouse Toulouse, France firstname.lastname@laas.fr Douglas Aberdeen National ICT australia & The Australian National University
FF+FPG: Guiding a Policy-Gradient Planner Olivier Buffet LAAS-CNRS University of Toulouse Toulouse, France firstname.lastname@laas.fr Douglas Aberdeen National ICT australia & The Australian National University
AMULTIAGENT system [1] can be defined as a group of
![AMULTIAGENT system [1] can be defined as a group of](/thumbs/71/65976880.jpg "AMULTIAGENT system [1] can be defined as a group of") 156 IEEE TRANSACTIONS ON SYSTEMS, MAN, AND CYBERNETICS PART C: APPLICATIONS AND REVIEWS, VOL. 38, NO. 2, MARCH 2008 A Comprehensive Survey of Multiagent Reinforcement Learning Lucian Buşoniu, Robert Babuška,
156 IEEE TRANSACTIONS ON SYSTEMS, MAN, AND CYBERNETICS PART C: APPLICATIONS AND REVIEWS, VOL. 38, NO. 2, MARCH 2008 A Comprehensive Survey of Multiagent Reinforcement Learning Lucian Buşoniu, Robert Babuška,
(Sub)Gradient Descent
Gradient Descent") (Sub)Gradient Descent CMSC 422 MARINE CARPUAT marine@cs.umd.edu Figures credit: Piyush Rai Logistics Midterm is on Thursday 3/24 during class time closed book/internet/etc, one page of notes. will include
(Sub)Gradient Descent CMSC 422 MARINE CARPUAT marine@cs.umd.edu Figures credit: Piyush Rai Logistics Midterm is on Thursday 3/24 during class time closed book/internet/etc, one page of notes. will include
High-level Reinforcement Learning in Strategy Games
 High-level Reinforcement Learning in Strategy Games Christopher Amato Department of Computer Science University of Massachusetts Amherst, MA 01003 USA camato@cs.umass.edu Guy Shani Department of Computer
High-level Reinforcement Learning in Strategy Games Christopher Amato Department of Computer Science University of Massachusetts Amherst, MA 01003 USA camato@cs.umass.edu Guy Shani Department of Computer
ReinForest: Multi-Domain Dialogue Management Using Hierarchical Policies and Knowledge Ontology
 ReinForest: Multi-Domain Dialogue Management Using Hierarchical Policies and Knowledge Ontology Tiancheng Zhao CMU-LTI-16-006 Language Technologies Institute School of Computer Science Carnegie Mellon
ReinForest: Multi-Domain Dialogue Management Using Hierarchical Policies and Knowledge Ontology Tiancheng Zhao CMU-LTI-16-006 Language Technologies Institute School of Computer Science Carnegie Mellon
Continual Curiosity-Driven Skill Acquisition from High-Dimensional Video Inputs for Humanoid Robots
 Continual Curiosity-Driven Skill Acquisition from High-Dimensional Video Inputs for Humanoid Robots Varun Raj Kompella, Marijn Stollenga, Matthew Luciw, Juergen Schmidhuber The Swiss AI Lab IDSIA, USI
Continual Curiosity-Driven Skill Acquisition from High-Dimensional Video Inputs for Humanoid Robots Varun Raj Kompella, Marijn Stollenga, Matthew Luciw, Juergen Schmidhuber The Swiss AI Lab IDSIA, USI
Improving Action Selection in MDP s via Knowledge Transfer
 In Proc. 20th National Conference on Artificial Intelligence (AAAI-05), July 9 13, 2005, Pittsburgh, USA. Improving Action Selection in MDP s via Knowledge Transfer Alexander A. Sherstov and Peter Stone
In Proc. 20th National Conference on Artificial Intelligence (AAAI-05), July 9 13, 2005, Pittsburgh, USA. Improving Action Selection in MDP s via Knowledge Transfer Alexander A. Sherstov and Peter Stone
arxiv: v1 [cs.dc] 19 May 2017
![arxiv: v1 [cs.dc] 19 May 2017](/thumbs/71/66085786.jpg "arxiv: v1 [cs.dc] 19 May 2017") Atari games and Intel processors Robert Adamski, Tomasz Grel, Maciej Klimek and Henryk Michalewski arxiv:1705.06936v1 [cs.dc] 19 May 2017 Intel, deepsense.io, University of Warsaw Robert.Adamski@intel.com,
Atari games and Intel processors Robert Adamski, Tomasz Grel, Maciej Klimek and Henryk Michalewski arxiv:1705.06936v1 [cs.dc] 19 May 2017 Intel, deepsense.io, University of Warsaw Robert.Adamski@intel.com,
Regret-based Reward Elicitation for Markov Decision Processes
 444 REGAN & BOUTILIER UAI 2009 Regret-based Reward Elicitation for Markov Decision Processes Kevin Regan Department of Computer Science University of Toronto Toronto, ON, CANADA kmregan@cs.toronto.edu
444 REGAN & BOUTILIER UAI 2009 Regret-based Reward Elicitation for Markov Decision Processes Kevin Regan Department of Computer Science University of Toronto Toronto, ON, CANADA kmregan@cs.toronto.edu
Introduction to Simulation
 Introduction to Simulation Spring 2010 Dr. Louis Luangkesorn University of Pittsburgh January 19, 2010 Dr. Louis Luangkesorn ( University of Pittsburgh ) Introduction to Simulation January 19, 2010 1 /
Introduction to Simulation Spring 2010 Dr. Louis Luangkesorn University of Pittsburgh January 19, 2010 Dr. Louis Luangkesorn ( University of Pittsburgh ) Introduction to Simulation January 19, 2010 1 /
Task Completion Transfer Learning for Reward Inference
 Machine Learning for Interactive Systems: Papers from the AAAI-14 Workshop Task Completion Transfer Learning for Reward Inference Layla El Asri 1,2, Romain Laroche 1, Olivier Pietquin 3 1 Orange Labs,
Machine Learning for Interactive Systems: Papers from the AAAI-14 Workshop Task Completion Transfer Learning for Reward Inference Layla El Asri 1,2, Romain Laroche 1, Olivier Pietquin 3 1 Orange Labs,
Learning Optimal Dialogue Strategies: A Case Study of a Spoken Dialogue Agent for
 Learning Optimal Dialogue Strategies: A Case Study of a Spoken Dialogue Agent for Email Marilyn A. Walker Jeanne C. Fromer Shrikanth Narayanan walker@research.att.com jeannie@ai.mit.edu shri@research.att.com
Learning Optimal Dialogue Strategies: A Case Study of a Spoken Dialogue Agent for Email Marilyn A. Walker Jeanne C. Fromer Shrikanth Narayanan walker@research.att.com jeannie@ai.mit.edu shri@research.att.com
Learning Structural Correspondences Across Different Linguistic Domains with Synchronous Neural Language Models
 Learning Structural Correspondences Across Different Linguistic Domains with Synchronous Neural Language Models Stephan Gouws and GJ van Rooyen MIH Medialab, Stellenbosch University SOUTH AFRICA {stephan,gvrooyen}@ml.sun.ac.za
Learning Structural Correspondences Across Different Linguistic Domains with Synchronous Neural Language Models Stephan Gouws and GJ van Rooyen MIH Medialab, Stellenbosch University SOUTH AFRICA {stephan,gvrooyen}@ml.sun.ac.za
Speeding Up Reinforcement Learning with Behavior Transfer
 Speeding Up Reinforcement Learning with Behavior Transfer Matthew E. Taylor and Peter Stone Department of Computer Sciences The University of Texas at Austin Austin, Texas 78712-1188 {mtaylor, pstone}@cs.utexas.edu
Speeding Up Reinforcement Learning with Behavior Transfer Matthew E. Taylor and Peter Stone Department of Computer Sciences The University of Texas at Austin Austin, Texas 78712-1188 {mtaylor, pstone}@cs.utexas.edu
Evolutive Neural Net Fuzzy Filtering: Basic Description
 Journal of Intelligent Learning Systems and Applications, 2010, 2: 12-18 doi:10.4236/jilsa.2010.21002 Published Online February 2010 (http://www.scirp.org/journal/jilsa) Evolutive Neural Net Fuzzy Filtering:
Journal of Intelligent Learning Systems and Applications, 2010, 2: 12-18 doi:10.4236/jilsa.2010.21002 Published Online February 2010 (http://www.scirp.org/journal/jilsa) Evolutive Neural Net Fuzzy Filtering:
Lecture 1: Basic Concepts of Machine Learning
 Lecture 1: Basic Concepts of Machine Learning Cognitive Systems - Machine Learning Ute Schmid (lecture) Johannes Rabold (practice) Based on slides prepared March 2005 by Maximilian Röglinger, updated 2010
Lecture 1: Basic Concepts of Machine Learning Cognitive Systems - Machine Learning Ute Schmid (lecture) Johannes Rabold (practice) Based on slides prepared March 2005 by Maximilian Röglinger, updated 2010
Active Learning. Yingyu Liang Computer Sciences 760 Fall
 Active Learning Yingyu Liang Computer Sciences 760 Fall 2017 http://pages.cs.wisc.edu/~yliang/cs760/ Some of the slides in these lectures have been adapted/borrowed from materials developed by Mark Craven,
Active Learning Yingyu Liang Computer Sciences 760 Fall 2017 http://pages.cs.wisc.edu/~yliang/cs760/ Some of the slides in these lectures have been adapted/borrowed from materials developed by Mark Craven,
Task Completion Transfer Learning for Reward Inference
 Task Completion Transfer Learning for Reward Inference Layla El Asri 1,2, Romain Laroche 1, Olivier Pietquin 3 1 Orange Labs, Issy-les-Moulineaux, France 2 UMI 2958 (CNRS - GeorgiaTech), France 3 University
Task Completion Transfer Learning for Reward Inference Layla El Asri 1,2, Romain Laroche 1, Olivier Pietquin 3 1 Orange Labs, Issy-les-Moulineaux, France 2 UMI 2958 (CNRS - GeorgiaTech), France 3 University
Learning and Transferring Relational Instance-Based Policies
 Learning and Transferring Relational Instance-Based Policies Rocío García-Durán, Fernando Fernández y Daniel Borrajo Universidad Carlos III de Madrid Avda de la Universidad 30, 28911-Leganés (Madrid),
Learning and Transferring Relational Instance-Based Policies Rocío García-Durán, Fernando Fernández y Daniel Borrajo Universidad Carlos III de Madrid Avda de la Universidad 30, 28911-Leganés (Madrid),
Improving Fairness in Memory Scheduling
 Improving Fairness in Memory Scheduling Using a Team of Learning Automata Aditya Kajwe and Madhu Mutyam Department of Computer Science & Engineering, Indian Institute of Tehcnology - Madras June 14, 2014
Improving Fairness in Memory Scheduling Using a Team of Learning Automata Aditya Kajwe and Madhu Mutyam Department of Computer Science & Engineering, Indian Institute of Tehcnology - Madras June 14, 2014
Seminar - Organic Computing
 Seminar - Organic Computing Self-Organisation of OC-Systems Markus Franke 25.01.2006 Typeset by FoilTEX Timetable 1. Overview 2. Characteristics of SO-Systems 3. Concern with Nature 4. Design-Concepts
Seminar - Organic Computing Self-Organisation of OC-Systems Markus Franke 25.01.2006 Typeset by FoilTEX Timetable 1. Overview 2. Characteristics of SO-Systems 3. Concern with Nature 4. Design-Concepts
A Review: Speech Recognition with Deep Learning Methods
 Available Online at www.ijcsmc.com International Journal of Computer Science and Mobile Computing A Monthly Journal of Computer Science and Information Technology IJCSMC, Vol. 4, Issue. 5, May 2015, pg.1017
Available Online at www.ijcsmc.com International Journal of Computer Science and Mobile Computing A Monthly Journal of Computer Science and Information Technology IJCSMC, Vol. 4, Issue. 5, May 2015, pg.1017
Knowledge Transfer in Deep Convolutional Neural Nets
 Knowledge Transfer in Deep Convolutional Neural Nets Steven Gutstein, Olac Fuentes and Eric Freudenthal Computer Science Department University of Texas at El Paso El Paso, Texas, 79968, U.S.A. Abstract
Knowledge Transfer in Deep Convolutional Neural Nets Steven Gutstein, Olac Fuentes and Eric Freudenthal Computer Science Department University of Texas at El Paso El Paso, Texas, 79968, U.S.A. Abstract
The Good Judgment Project: A large scale test of different methods of combining expert predictions
 The Good Judgment Project: A large scale test of different methods of combining expert predictions Lyle Ungar, Barb Mellors, Jon Baron, Phil Tetlock, Jaime Ramos, Sam Swift The University of Pennsylvania
The Good Judgment Project: A large scale test of different methods of combining expert predictions Lyle Ungar, Barb Mellors, Jon Baron, Phil Tetlock, Jaime Ramos, Sam Swift The University of Pennsylvania
Learning to Schedule Straight-Line Code
 Learning to Schedule Straight-Line Code Eliot Moss, Paul Utgoff, John Cavazos Doina Precup, Darko Stefanović Dept. of Comp. Sci., Univ. of Mass. Amherst, MA 01003 Carla Brodley, David Scheeff Sch. of Elec.
Learning to Schedule Straight-Line Code Eliot Moss, Paul Utgoff, John Cavazos Doina Precup, Darko Stefanović Dept. of Comp. Sci., Univ. of Mass. Amherst, MA 01003 Carla Brodley, David Scheeff Sch. of Elec.
Teachable Robots: Understanding Human Teaching Behavior to Build More Effective Robot Learners
 Teachable Robots: Understanding Human Teaching Behavior to Build More Effective Robot Learners Andrea L. Thomaz and Cynthia Breazeal Abstract While Reinforcement Learning (RL) is not traditionally designed
Teachable Robots: Understanding Human Teaching Behavior to Build More Effective Robot Learners Andrea L. Thomaz and Cynthia Breazeal Abstract While Reinforcement Learning (RL) is not traditionally designed
Truth Inference in Crowdsourcing: Is the Problem Solved?
 Truth Inference in Crowdsourcing: Is the Problem Solved? Yudian Zheng, Guoliang Li #, Yuanbing Li #, Caihua Shan, Reynold Cheng # Department of Computer Science, Tsinghua University Department of Computer
Truth Inference in Crowdsourcing: Is the Problem Solved? Yudian Zheng, Guoliang Li #, Yuanbing Li #, Caihua Shan, Reynold Cheng # Department of Computer Science, Tsinghua University Department of Computer
A Reinforcement Learning Variant for Control Scheduling
 A Reinforcement Learning Variant for Control Scheduling Aloke Guha Honeywell Sensor and System Development Center 3660 Technology Drive Minneapolis MN 55417 Abstract We present an algorithm based on reinforcement
A Reinforcement Learning Variant for Control Scheduling Aloke Guha Honeywell Sensor and System Development Center 3660 Technology Drive Minneapolis MN 55417 Abstract We present an algorithm based on reinforcement
Deep search. Enhancing a search bar using machine learning. Ilgün Ilgün & Cedric Reichenbach
 #BaselOne7 Deep search Enhancing a search bar using machine learning Ilgün Ilgün & Cedric Reichenbach We are not researchers Outline I. Periscope: A search tool II. Goals III. Deep learning IV. Applying
#BaselOne7 Deep search Enhancing a search bar using machine learning Ilgün Ilgün & Cedric Reichenbach We are not researchers Outline I. Periscope: A search tool II. Goals III. Deep learning IV. Applying
Using Deep Convolutional Neural Networks in Monte Carlo Tree Search
 Using Deep Convolutional Neural Networks in Monte Carlo Tree Search Tobias Graf (B) and Marco Platzner University of Paderborn, Paderborn, Germany tobiasg@mail.upb.de, platzner@upb.de Abstract. Deep Convolutional
Using Deep Convolutional Neural Networks in Monte Carlo Tree Search Tobias Graf (B) and Marco Platzner University of Paderborn, Paderborn, Germany tobiasg@mail.upb.de, platzner@upb.de Abstract. Deep Convolutional
A Comparison of Annealing Techniques for Academic Course Scheduling
 A Comparison of Annealing Techniques for Academic Course Scheduling M. A. Saleh Elmohamed 1, Paul Coddington 2, and Geoffrey Fox 1 1 Northeast Parallel Architectures Center Syracuse University, Syracuse,
A Comparison of Annealing Techniques for Academic Course Scheduling M. A. Saleh Elmohamed 1, Paul Coddington 2, and Geoffrey Fox 1 1 Northeast Parallel Architectures Center Syracuse University, Syracuse,
Agents and environments. Intelligent Agents. Reminders. Vacuum-cleaner world. Outline. A vacuum-cleaner agent. Chapter 2 Actuators
 s and environments Percepts Intelligent s? Chapter 2 Actions s include humans, robots, softbots, thermostats, etc. The agent function maps from percept histories to actions: f : P A The agent program runs
s and environments Percepts Intelligent s? Chapter 2 Actions s include humans, robots, softbots, thermostats, etc. The agent function maps from percept histories to actions: f : P A The agent program runs
Chapter 2. Intelligent Agents. Outline. Agents and environments. Rationality. PEAS (Performance measure, Environment, Actuators, Sensors)
") Intelligent Agents Chapter 2 1 Outline Agents and environments Rationality PEAS (Performance measure, Environment, Actuators, Sensors) Agent types 2 Agents and environments sensors environment percepts
Intelligent Agents Chapter 2 1 Outline Agents and environments Rationality PEAS (Performance measure, Environment, Actuators, Sensors) Agent types 2 Agents and environments sensors environment percepts
Automatic Discretization of Actions and States in Monte-Carlo Tree Search
 Automatic Discretization of Actions and States in Monte-Carlo Tree Search Guy Van den Broeck 1 and Kurt Driessens 2 1 Katholieke Universiteit Leuven, Department of Computer Science, Leuven, Belgium guy.vandenbroeck@cs.kuleuven.be
Automatic Discretization of Actions and States in Monte-Carlo Tree Search Guy Van den Broeck 1 and Kurt Driessens 2 1 Katholieke Universiteit Leuven, Department of Computer Science, Leuven, Belgium guy.vandenbroeck@cs.kuleuven.be
A Simple VQA Model with a Few Tricks and Image Features from Bottom-up Attention
 A Simple VQA Model with a Few Tricks and Image Features from Bottom-up Attention Damien Teney 1, Peter Anderson 2*, David Golub 4*, Po-Sen Huang 3, Lei Zhang 3, Xiaodong He 3, Anton van den Hengel 1 1
A Simple VQA Model with a Few Tricks and Image Features from Bottom-up Attention Damien Teney 1, Peter Anderson 2*, David Golub 4*, Po-Sen Huang 3, Lei Zhang 3, Xiaodong He 3, Anton van den Hengel 1 1
An OO Framework for building Intelligence and Learning properties in Software Agents
 An OO Framework for building Intelligence and Learning properties in Software Agents José A. R. P. Sardinha, Ruy L. Milidiú, Carlos J. P. Lucena, Patrick Paranhos Abstract Software agents are defined as
An OO Framework for building Intelligence and Learning properties in Software Agents José A. R. P. Sardinha, Ruy L. Milidiú, Carlos J. P. Lucena, Patrick Paranhos Abstract Software agents are defined as
BMBF Project ROBUKOM: Robust Communication Networks
 BMBF Project ROBUKOM: Robust Communication Networks Arie M.C.A. Koster Christoph Helmberg Andreas Bley Martin Grötschel Thomas Bauschert supported by BMBF grant 03MS616A: ROBUKOM Robust Communication Networks,
BMBF Project ROBUKOM: Robust Communication Networks Arie M.C.A. Koster Christoph Helmberg Andreas Bley Martin Grötschel Thomas Bauschert supported by BMBF grant 03MS616A: ROBUKOM Robust Communication Networks,
LEGO MINDSTORMS Education EV3 Coding Activities
 LEGO MINDSTORMS Education EV3 Coding Activities s t e e h s k r o W t n e d Stu LEGOeducation.com/MINDSTORMS Contents ACTIVITY 1 Performing a Three Point Turn 3-6 ACTIVITY 2 Written Instructions for a
LEGO MINDSTORMS Education EV3 Coding Activities s t e e h s k r o W t n e d Stu LEGOeducation.com/MINDSTORMS Contents ACTIVITY 1 Performing a Three Point Turn 3-6 ACTIVITY 2 Written Instructions for a
Softprop: Softmax Neural Network Backpropagation Learning
 Softprop: Softmax Neural Networ Bacpropagation Learning Michael Rimer Computer Science Department Brigham Young University Provo, UT 84602, USA E-mail: mrimer@axon.cs.byu.edu Tony Martinez Computer Science
Softprop: Softmax Neural Networ Bacpropagation Learning Michael Rimer Computer Science Department Brigham Young University Provo, UT 84602, USA E-mail: mrimer@axon.cs.byu.edu Tony Martinez Computer Science
Learning Prospective Robot Behavior
 Learning Prospective Robot Behavior Shichao Ou and Rod Grupen Laboratory for Perceptual Robotics Computer Science Department University of Massachusetts Amherst {chao,grupen}@cs.umass.edu Abstract This
Learning Prospective Robot Behavior Shichao Ou and Rod Grupen Laboratory for Perceptual Robotics Computer Science Department University of Massachusetts Amherst {chao,grupen}@cs.umass.edu Abstract This
A Neural Network GUI Tested on Text-To-Phoneme Mapping
 A Neural Network GUI Tested on Text-To-Phoneme Mapping MAARTEN TROMPPER Universiteit Utrecht m.f.a.trompper@students.uu.nl Abstract Text-to-phoneme (T2P) mapping is a necessary step in any speech synthesis
A Neural Network GUI Tested on Text-To-Phoneme Mapping MAARTEN TROMPPER Universiteit Utrecht m.f.a.trompper@students.uu.nl Abstract Text-to-phoneme (T2P) mapping is a necessary step in any speech synthesis
On the Combined Behavior of Autonomous Resource Management Agents
 On the Combined Behavior of Autonomous Resource Management Agents Siri Fagernes 1 and Alva L. Couch 2 1 Faculty of Engineering Oslo University College Oslo, Norway siri.fagernes@iu.hio.no 2 Computer Science
On the Combined Behavior of Autonomous Resource Management Agents Siri Fagernes 1 and Alva L. Couch 2 1 Faculty of Engineering Oslo University College Oslo, Norway siri.fagernes@iu.hio.no 2 Computer Science
Distributed Learning of Multilingual DNN Feature Extractors using GPUs
 Distributed Learning of Multilingual DNN Feature Extractors using GPUs Yajie Miao, Hao Zhang, Florian Metze Language Technologies Institute, School of Computer Science, Carnegie Mellon University Pittsburgh,
Distributed Learning of Multilingual DNN Feature Extractors using GPUs Yajie Miao, Hao Zhang, Florian Metze Language Technologies Institute, School of Computer Science, Carnegie Mellon University Pittsburgh,
Testing A Moving Target: How Do We Test Machine Learning Systems? Peter Varhol Technology Strategy Research, USA
 Testing A Moving Target: How Do We Test Machine Learning Systems? Peter Varhol Technology Strategy Research, USA Testing a Moving Target How Do We Test Machine Learning Systems? Peter Varhol, Technology
Testing A Moving Target: How Do We Test Machine Learning Systems? Peter Varhol Technology Strategy Research, USA Testing a Moving Target How Do We Test Machine Learning Systems? Peter Varhol, Technology
HIERARCHICAL DEEP LEARNING ARCHITECTURE FOR 10K OBJECTS CLASSIFICATION
 HIERARCHICAL DEEP LEARNING ARCHITECTURE FOR 10K OBJECTS CLASSIFICATION Atul Laxman Katole 1, Krishna Prasad Yellapragada 1, Amish Kumar Bedi 1, Sehaj Singh Kalra 1 and Mynepalli Siva Chaitanya 1 1 Samsung
HIERARCHICAL DEEP LEARNING ARCHITECTURE FOR 10K OBJECTS CLASSIFICATION Atul Laxman Katole 1, Krishna Prasad Yellapragada 1, Amish Kumar Bedi 1, Sehaj Singh Kalra 1 and Mynepalli Siva Chaitanya 1 1 Samsung
Model Ensemble for Click Prediction in Bing Search Ads
 Model Ensemble for Click Prediction in Bing Search Ads Xiaoliang Ling Microsoft Bing xiaoling@microsoft.com Hucheng Zhou Microsoft Research huzho@microsoft.com Weiwei Deng Microsoft Bing dedeng@microsoft.com
Model Ensemble for Click Prediction in Bing Search Ads Xiaoliang Ling Microsoft Bing xiaoling@microsoft.com Hucheng Zhou Microsoft Research huzho@microsoft.com Weiwei Deng Microsoft Bing dedeng@microsoft.com
Deep Neural Network Language Models
 Deep Neural Network Language Models Ebru Arısoy, Tara N. Sainath, Brian Kingsbury, Bhuvana Ramabhadran IBM T.J. Watson Research Center Yorktown Heights, NY, 10598, USA {earisoy, tsainath, bedk, bhuvana}@us.ibm.com
Deep Neural Network Language Models Ebru Arısoy, Tara N. Sainath, Brian Kingsbury, Bhuvana Ramabhadran IBM T.J. Watson Research Center Yorktown Heights, NY, 10598, USA {earisoy, tsainath, bedk, bhuvana}@us.ibm.com
INPE São José dos Campos
 INPE-5479 PRE/1778 MONLINEAR ASPECTS OF DATA INTEGRATION FOR LAND COVER CLASSIFICATION IN A NEDRAL NETWORK ENVIRONNENT Maria Suelena S. Barros Valter Rodrigues INPE São José dos Campos 1993 SECRETARIA
INPE-5479 PRE/1778 MONLINEAR ASPECTS OF DATA INTEGRATION FOR LAND COVER CLASSIFICATION IN A NEDRAL NETWORK ENVIRONNENT Maria Suelena S. Barros Valter Rodrigues INPE São José dos Campos 1993 SECRETARIA
Experiments with SMS Translation and Stochastic Gradient Descent in Spanish Text Author Profiling
 Experiments with SMS Translation and Stochastic Gradient Descent in Spanish Text Author Profiling Notebook for PAN at CLEF 2013 Andrés Alfonso Caurcel Díaz 1 and José María Gómez Hidalgo 2 1 Universidad
Experiments with SMS Translation and Stochastic Gradient Descent in Spanish Text Author Profiling Notebook for PAN at CLEF 2013 Andrés Alfonso Caurcel Díaz 1 and José María Gómez Hidalgo 2 1 Universidad
Machine Learning and Data Mining. Ensembles of Learners. Prof. Alexander Ihler
 Machine Learning and Data Mining Ensembles of Learners Prof. Alexander Ihler Ensemble methods Why learn one classifier when you can learn many? Ensemble: combine many predictors (Weighted) combina
Machine Learning and Data Mining Ensembles of Learners Prof. Alexander Ihler Ensemble methods Why learn one classifier when you can learn many? Ensemble: combine many predictors (Weighted) combina
Application of Virtual Instruments (VIs) for an enhanced learning environment
 for an enhanced learning environment") Application of Virtual Instruments (VIs) for an enhanced learning environment Philip Smyth, Dermot Brabazon, Eilish McLoughlin Schools of Mechanical and Physical Sciences Dublin City University Ireland
Application of Virtual Instruments (VIs) for an enhanced learning environment Philip Smyth, Dermot Brabazon, Eilish McLoughlin Schools of Mechanical and Physical Sciences Dublin City University Ireland
Transferring End-to-End Visuomotor Control from Simulation to Real World for a Multi-Stage Task
 Transferring End-to-End Visuomotor Control from Simulation to Real World for a Multi-Stage Task Stephen James Dyson Robotics Lab Imperial College London slj12@ic.ac.uk Andrew J. Davison Dyson Robotics
Transferring End-to-End Visuomotor Control from Simulation to Real World for a Multi-Stage Task Stephen James Dyson Robotics Lab Imperial College London slj12@ic.ac.uk Andrew J. Davison Dyson Robotics
Semi-Supervised GMM and DNN Acoustic Model Training with Multi-system Combination and Confidence Re-calibration
 INTERSPEECH 2013 Semi-Supervised GMM and DNN Acoustic Model Training with Multi-system Combination and Confidence Re-calibration Yan Huang, Dong Yu, Yifan Gong, and Chaojun Liu Microsoft Corporation, One
INTERSPEECH 2013 Semi-Supervised GMM and DNN Acoustic Model Training with Multi-system Combination and Confidence Re-calibration Yan Huang, Dong Yu, Yifan Gong, and Chaojun Liu Microsoft Corporation, One
System Implementation for SemEval-2017 Task 4 Subtask A Based on Interpolated Deep Neural Networks
 System Implementation for SemEval-2017 Task 4 Subtask A Based on Interpolated Deep Neural Networks 1 Tzu-Hsuan Yang, 2 Tzu-Hsuan Tseng, and 3 Chia-Ping Chen Department of Computer Science and Engineering
System Implementation for SemEval-2017 Task 4 Subtask A Based on Interpolated Deep Neural Networks 1 Tzu-Hsuan Yang, 2 Tzu-Hsuan Tseng, and 3 Chia-Ping Chen Department of Computer Science and Engineering
An empirical study of learning speed in backpropagation
 Carnegie Mellon University Research Showcase @ CMU Computer Science Department School of Computer Science 1988 An empirical study of learning speed in backpropagation networks Scott E. Fahlman Carnegie
Carnegie Mellon University Research Showcase @ CMU Computer Science Department School of Computer Science 1988 An empirical study of learning speed in backpropagation networks Scott E. Fahlman Carnegie
Iterative Cross-Training: An Algorithm for Learning from Unlabeled Web Pages
 Iterative Cross-Training: An Algorithm for Learning from Unlabeled Web Pages Nuanwan Soonthornphisaj 1 and Boonserm Kijsirikul 2 Machine Intelligence and Knowledge Discovery Laboratory Department of Computer
Iterative Cross-Training: An Algorithm for Learning from Unlabeled Web Pages Nuanwan Soonthornphisaj 1 and Boonserm Kijsirikul 2 Machine Intelligence and Knowledge Discovery Laboratory Department of Computer
An investigation of imitation learning algorithms for structured prediction
 JMLR: Workshop and Conference Proceedings 24:143 153, 2012 10th European Workshop on Reinforcement Learning An investigation of imitation learning algorithms for structured prediction Andreas Vlachos Computer
JMLR: Workshop and Conference Proceedings 24:143 153, 2012 10th European Workshop on Reinforcement Learning An investigation of imitation learning algorithms for structured prediction Andreas Vlachos Computer
arxiv: v1 [cs.lg] 8 Mar 2017
![arxiv: v1 [cs.lg] 8 Mar 2017](/thumbs/71/66141350.jpg "arxiv: v1 [cs.lg] 8 Mar 2017") Lerrel Pinto 1 James Davidson 2 Rahul Sukthankar 3 Abhinav Gupta 1 3 arxiv:173.272v1 [cs.lg] 8 Mar 217 Abstract Deep neural networks coupled with fast simulation and improved computation have led to recent
Lerrel Pinto 1 James Davidson 2 Rahul Sukthankar 3 Abhinav Gupta 1 3 arxiv:173.272v1 [cs.lg] 8 Mar 217 Abstract Deep neural networks coupled with fast simulation and improved computation have led to recent
Human Emotion Recognition From Speech
 RESEARCH ARTICLE OPEN ACCESS Human Emotion Recognition From Speech Miss. Aparna P. Wanare*, Prof. Shankar N. Dandare *(Department of Electronics & Telecommunication Engineering, Sant Gadge Baba Amravati
RESEARCH ARTICLE OPEN ACCESS Human Emotion Recognition From Speech Miss. Aparna P. Wanare*, Prof. Shankar N. Dandare *(Department of Electronics & Telecommunication Engineering, Sant Gadge Baba Amravati
Visual CP Representation of Knowledge
 Visual CP Representation of Knowledge Heather D. Pfeiffer and Roger T. Hartley Department of Computer Science New Mexico State University Las Cruces, NM 88003-8001, USA email: hdp@cs.nmsu.edu and rth@cs.nmsu.edu
Visual CP Representation of Knowledge Heather D. Pfeiffer and Roger T. Hartley Department of Computer Science New Mexico State University Las Cruces, NM 88003-8001, USA email: hdp@cs.nmsu.edu and rth@cs.nmsu.edu
QuickStroke: An Incremental On-line Chinese Handwriting Recognition System
 QuickStroke: An Incremental On-line Chinese Handwriting Recognition System Nada P. Matić John C. Platt Λ Tony Wang y Synaptics, Inc. 2381 Bering Drive San Jose, CA 95131, USA Abstract This paper presents
QuickStroke: An Incremental On-line Chinese Handwriting Recognition System Nada P. Matić John C. Platt Λ Tony Wang y Synaptics, Inc. 2381 Bering Drive San Jose, CA 95131, USA Abstract This paper presents
An Introduction to Simulation Optimization
 An Introduction to Simulation Optimization Nanjing Jian Shane G. Henderson Introductory Tutorials Winter Simulation Conference December 7, 2015 Thanks: NSF CMMI1200315 1 Contents 1. Introduction 2. Common
An Introduction to Simulation Optimization Nanjing Jian Shane G. Henderson Introductory Tutorials Winter Simulation Conference December 7, 2015 Thanks: NSF CMMI1200315 1 Contents 1. Introduction 2. Common
OPTIMIZATINON OF TRAINING SETS FOR HEBBIAN-LEARNING- BASED CLASSIFIERS
 OPTIMIZATINON OF TRAINING SETS FOR HEBBIAN-LEARNING- BASED CLASSIFIERS Václav Kocian, Eva Volná, Michal Janošek, Martin Kotyrba University of Ostrava Department of Informatics and Computers Dvořákova 7,
OPTIMIZATINON OF TRAINING SETS FOR HEBBIAN-LEARNING- BASED CLASSIFIERS Václav Kocian, Eva Volná, Michal Janošek, Martin Kotyrba University of Ostrava Department of Informatics and Computers Dvořákova 7,
Discriminative Learning of Beam-Search Heuristics for Planning
 Discriminative Learning of Beam-Search Heuristics for Planning Yuehua Xu School of EECS Oregon State University Corvallis,OR 97331 xuyu@eecs.oregonstate.edu Alan Fern School of EECS Oregon State University
Discriminative Learning of Beam-Search Heuristics for Planning Yuehua Xu School of EECS Oregon State University Corvallis,OR 97331 xuyu@eecs.oregonstate.edu Alan Fern School of EECS Oregon State University
An Introduction to Simio for Beginners
 An Introduction to Simio for Beginners C. Dennis Pegden, Ph.D. This white paper is intended to introduce Simio to a user new to simulation. It is intended for the manufacturing engineer, hospital quality
An Introduction to Simio for Beginners C. Dennis Pegden, Ph.D. This white paper is intended to introduce Simio to a user new to simulation. It is intended for the manufacturing engineer, hospital quality
arxiv: v2 [cs.ir] 22 Aug 2016
![arxiv: v2 [cs.ir] 22 Aug 2016](/thumbs/71/66014616.jpg "arxiv: v2 [cs.ir] 22 Aug 2016") Exploring Deep Space: Learning Personalized Ranking in a Semantic Space arxiv:1608.00276v2 [cs.ir] 22 Aug 2016 ABSTRACT Jeroen B. P. Vuurens The Hague University of Applied Science Delft University of
Exploring Deep Space: Learning Personalized Ranking in a Semantic Space arxiv:1608.00276v2 [cs.ir] 22 Aug 2016 ABSTRACT Jeroen B. P. Vuurens The Hague University of Applied Science Delft University of
A study of speaker adaptation for DNN-based speech synthesis
 A study of speaker adaptation for DNN-based speech synthesis Zhizheng Wu, Pawel Swietojanski, Christophe Veaux, Steve Renals, Simon King The Centre for Speech Technology Research (CSTR) University of Edinburgh,
A study of speaker adaptation for DNN-based speech synthesis Zhizheng Wu, Pawel Swietojanski, Christophe Veaux, Steve Renals, Simon King The Centre for Speech Technology Research (CSTR) University of Edinburgh,
arxiv: v1 [cs.cv] 10 May 2017
![arxiv: v1 [cs.cv] 10 May 2017](/thumbs/71/66178677.jpg "arxiv: v1 [cs.cv] 10 May 2017") Inferring and Executing Programs for Visual Reasoning Justin Johnson 1 Bharath Hariharan 2 Laurens van der Maaten 2 Judy Hoffman 1 Li Fei-Fei 1 C. Lawrence Zitnick 2 Ross Girshick 2 1 Stanford University
Inferring and Executing Programs for Visual Reasoning Justin Johnson 1 Bharath Hariharan 2 Laurens van der Maaten 2 Judy Hoffman 1 Li Fei-Fei 1 C. Lawrence Zitnick 2 Ross Girshick 2 1 Stanford University
Probabilistic Latent Semantic Analysis
 Probabilistic Latent Semantic Analysis Thomas Hofmann Presentation by Ioannis Pavlopoulos & Andreas Damianou for the course of Data Mining & Exploration 1 Outline Latent Semantic Analysis o Need o Overview
Probabilistic Latent Semantic Analysis Thomas Hofmann Presentation by Ioannis Pavlopoulos & Andreas Damianou for the course of Data Mining & Exploration 1 Outline Latent Semantic Analysis o Need o Overview
*Net Perceptions, Inc West 78th Street Suite 300 Minneapolis, MN
 From: AAAI Technical Report WS-98-08. Compilation copyright 1998, AAAI (www.aaai.org). All rights reserved. Recommender Systems: A GroupLens Perspective Joseph A. Konstan *t, John Riedl *t, AI Borchers,
From: AAAI Technical Report WS-98-08. Compilation copyright 1998, AAAI (www.aaai.org). All rights reserved. Recommender Systems: A GroupLens Perspective Joseph A. Konstan *t, John Riedl *t, AI Borchers,
Finding Your Friends and Following Them to Where You Are
 Finding Your Friends and Following Them to Where You Are Adam Sadilek Dept. of Computer Science University of Rochester Rochester, NY, USA sadilek@cs.rochester.edu Henry Kautz Dept. of Computer Science
Finding Your Friends and Following Them to Where You Are Adam Sadilek Dept. of Computer Science University of Rochester Rochester, NY, USA sadilek@cs.rochester.edu Henry Kautz Dept. of Computer Science
Copyright Corwin 2015
 2 Defining Essential Learnings How do I find clarity in a sea of standards? For students truly to be able to take responsibility for their learning, both teacher and students need to be very clear about
2 Defining Essential Learnings How do I find clarity in a sea of standards? For students truly to be able to take responsibility for their learning, both teacher and students need to be very clear about
A Pipelined Approach for Iterative Software Process Model
 A Pipelined Approach for Iterative Software Process Model Ms.Prasanthi E R, Ms.Aparna Rathi, Ms.Vardhani J P, Mr.Vivek Krishna Electronics and Radar Development Establishment C V Raman Nagar, Bangalore-560093,
A Pipelined Approach for Iterative Software Process Model Ms.Prasanthi E R, Ms.Aparna Rathi, Ms.Vardhani J P, Mr.Vivek Krishna Electronics and Radar Development Establishment C V Raman Nagar, Bangalore-560093,
Introduction to Ensemble Learning Featuring Successes in the Netflix Prize Competition
 Introduction to Ensemble Learning Featuring Successes in the Netflix Prize Competition Todd Holloway Two Lecture Series for B551 November 20 & 27, 2007 Indiana University Outline Introduction Bias and
Introduction to Ensemble Learning Featuring Successes in the Netflix Prize Competition Todd Holloway Two Lecture Series for B551 November 20 & 27, 2007 Indiana University Outline Introduction Bias and
The Evolution of Random Phenomena
 The Evolution of Random Phenomena A Look at Markov Chains Glen Wang glenw@uchicago.edu Splash! Chicago: Winter Cascade 2012 Lecture 1: What is Randomness? What is randomness? Can you think of some examples
The Evolution of Random Phenomena A Look at Markov Chains Glen Wang glenw@uchicago.edu Splash! Chicago: Winter Cascade 2012 Lecture 1: What is Randomness? What is randomness? Can you think of some examples
Intelligent Agents. Chapter 2. Chapter 2 1
 Intelligent Agents Chapter 2 Chapter 2 1 Outline Agents and environments Rationality PEAS (Performance measure, Environment, Actuators, Sensors) Environment types The structure of agents Chapter 2 2 Agents
Intelligent Agents Chapter 2 Chapter 2 1 Outline Agents and environments Rationality PEAS (Performance measure, Environment, Actuators, Sensors) Environment types The structure of agents Chapter 2 2 Agents
Chinese Language Parsing with Maximum-Entropy-Inspired Parser
 Chinese Language Parsing with Maximum-Entropy-Inspired Parser Heng Lian Brown University Abstract The Chinese language has many special characteristics that make parsing difficult. The performance of state-of-the-art
Chinese Language Parsing with Maximum-Entropy-Inspired Parser Heng Lian Brown University Abstract The Chinese language has many special characteristics that make parsing difficult. The performance of state-of-the-art
Rule Learning With Negation: Issues Regarding Effectiveness
 Rule Learning With Negation: Issues Regarding Effectiveness S. Chua, F. Coenen, G. Malcolm University of Liverpool Department of Computer Science, Ashton Building, Ashton Street, L69 3BX Liverpool, United
Rule Learning With Negation: Issues Regarding Effectiveness S. Chua, F. Coenen, G. Malcolm University of Liverpool Department of Computer Science, Ashton Building, Ashton Street, L69 3BX Liverpool, United
AUTOMATIC DETECTION OF PROLONGED FRICATIVE PHONEMES WITH THE HIDDEN MARKOV MODELS APPROACH 1. INTRODUCTION
 JOURNAL OF MEDICAL INFORMATICS & TECHNOLOGIES Vol. 11/2007, ISSN 1642-6037 Marek WIŚNIEWSKI *, Wiesława KUNISZYK-JÓŹKOWIAK *, Elżbieta SMOŁKA *, Waldemar SUSZYŃSKI * HMM, recognition, speech, disorders
JOURNAL OF MEDICAL INFORMATICS & TECHNOLOGIES Vol. 11/2007, ISSN 1642-6037 Marek WIŚNIEWSKI *, Wiesława KUNISZYK-JÓŹKOWIAK *, Elżbieta SMOŁKA *, Waldemar SUSZYŃSKI * HMM, recognition, speech, disorders
Learning Methods for Fuzzy Systems
 Learning Methods for Fuzzy Systems Rudolf Kruse and Andreas Nürnberger Department of Computer Science, University of Magdeburg Universitätsplatz, D-396 Magdeburg, Germany Phone : +49.39.67.876, Fax : +49.39.67.8
Learning Methods for Fuzzy Systems Rudolf Kruse and Andreas Nürnberger Department of Computer Science, University of Magdeburg Universitätsplatz, D-396 Magdeburg, Germany Phone : +49.39.67.876, Fax : +49.39.67.8