Reinforcement Learning: An Introduction. Deep Learning Indaba September 2017 Vukosi Marivate and Benjamin Rosman
|
|
|
- Valentine Chandler
- 6 years ago
- Views:
Transcription
1 Reinforcement Learning: An Introduction Deep Learning Indaba September 2017 Vukosi Marivate and Benjamin Rosman 1
2 Contents Contents 2 1. What is reinforcement learning? 2. Value-based methods 3. Model-based methods and policy search 4. Inverse reinforcement learning and applications

3 What is reinforcement learning? We ve seen how to solve many cool problems around supervised and unsupervised learning But a major component of intelligence is decision making 3

4 What is reinforcement learning? Reinforcement learning is the branch of machine learning relating to learning in sequential decision making settings Behaviour learning 4


5 From supervised to reinforcement Supervised learning, single decision point Multiple decision points How do I know if I m doing the right thing? How do my decisions now impact the future? Actions affect the environment! 5
 exists within an environment")
6 Interacting with an environment Decision maker (agent) exists within an environment 6
7 Interacting with an environment Decision maker (agent) exists within an environment Agent takes actions based on the environment state 7
8 Interacting with an environment Decision maker (agent) exists within an environment Agent takes actions based on the environment state 8 Environment state updates Agent receives feedback as rewards
9 A model for decision making Markov Decision Process (MDP) M = S, A, T, R, γ 9

10 A model for decision making Markov Decision Process (MDP) M = S, A, T, R, γ 10 States: encode world configurations Actions: choices made by agent

11 A model for decision making Markov Decision Process (MDP) M = S, A, T, R, γ Transition function: how the world evolves under actions 11
12 A model for decision making Markov Decision Process (MDP) M = S, A, T, R, γ Rewards: feedback signal to agent 12
13 A model for decision making Markov Decision Process (MDP) M = S, A, T, R, γ γ [0,1] discounting for future rewards 13
14 A model for decision making Markov Decision Process (MDP) M = S, A, T, R, γ Markov: Future is independent of the past, given the present 14

15 An example Cleaning Robot Actions: Reward: +1 for finding dirt -1 for falling into hole for every move 15

16 An example States: Position on grid e.g. S is (1,1), goal (4,3) 1 Actions: 0 Reward: +1 for finding dirt -1 for falling into hole for every move 16 0

17 What is the optimal policy?
18 What is the optimal policy? Change the action transitions?

19 What is the optimal policy? Change the action transitions?

 Not a single decision event Information about:")
 disease (genomics, progression etc.")
20 Practically, why RL? 20 Treating disease in an individual Chronic disease (HIV, Cancer, Schizophrenia, etc.) Not a single decision event Information about: patient (demographics, family history) body (test results, etc.) disease (genomics, progression etc.) How do we find the best treatment strategy?
21 Evaluating behaviours Many different trajectories are possible through a space 42 Use the total discounted accumulated rewards to evaluate them
desirable features of behaviours:")

22 Rewards Scalar feedback signal Encode (un)desirable features of behaviours: Winning/losing, collisions, taking expensive actions,... Sparse Delayed Only have relative value 22

23 The Rats of Hanoi 23
24 Policies A policy (or behaviour or strategy) states to actions Deterministic or stochastic is any mapping from Optimal policy * Accumulates maximal rewards over a trajectory This is what we want to learn! 24

25 Immediate vs delayed rewards Cannot just rely on the instantaneous reward function Tradeoff: don t just act myopically (short term) 1 step 5 steps Notion of value to codify the goodness of a state, considering a policy running into the future Represented as a value function 25
 starting at state s and then executing policy How good is s under?")
26 Value Functions Value function: accumulated reward The expected return (R) starting at state s and then executing policy How good is s under? 26
27 Example Value Functions Reward -1 for every move 27

28 Example Value Functions Random policy: 28
29 Example Value Functions Optimal policy: 29

30 So what? How do we use these ideas to do something useful? 30
31 Value Functions: Recursion V(s) expected return starting at s and following Suggests dependence on V(s ) from next state s Bellman Equation: value of s 31 immediate reward for all possible next states the probability of reaching that state with value of s
32 Value Functions: Optimality Similarly, for an optimal policy * with optimal value function V*: Bellman Optimality Equation: take the best possible action 32

33 Value Functions Action-value function: transition probability The expected return (R) starting at state s and executing action a, and then following policy How good is a in s under? 33
34 Optimal policies and value functions *(a s) := 1 if a = argmax Q*(s,a), 0 otherwise Move in direction of greatest value Finding Q* (or V*) is equivalent to finding * Every MDP has an optimal policy 34


35 The goal of RL Given this formulation, how do we learn a policy? 35
36 Solving Bellman Given the Bellman equation Solve this as a large system of value function equations But: non-linear (max operator) So: solve iteratively What are we trying to do here? 36 Learn how good each state of the world is, when looking perfectly into the future
37 Dynamic Programming Value Iteration: Dynamic Programming Iteratively update V (synchronous version) At each iteration i: For all states s in S: Update V(s) But: this requires the full MDP!! In general, T and R are unknown 37 (T,R,S,A)
38 Value Based Methods 38
39 Algorithm setup Value Based Methods: No Transition Model No Reward Model Access to environment for experiment or access to training data (s,a,r,s ) Goal: Learn Value of States, State-Actions Policy through learned values 39
40 Data generation T and R unknown! -5 Instead, generate samples of training data (s,a,r,s ) from environment 40 0
41 Learning from Experience We need A method to choose actions Some model to keep track of and learn Value Function 41
 that each generate rewards from different distributions Exploration vs")
42 The Bandit Problem Consider a row of one-arm bandit machines in a casino Set of arms (actions) that each generate rewards from different distributions Exploration vs exploitation 42
43 Action selection The exploration-exploitation tradeoff! Maximizing expected returns means balancing between: Exploiting gained knowledge (greedy) Take the best known action Exploring new actions/states (random) Try something new 43

44 Action selection strategies ε-greedy (0 < ε 1): With probability 1- ε exploit Choose the best action for a state With probability ε explore Randomly choose action ε usually higher at beginning of learning, decay later Softmax Sample action given softmax 44
45 Learning from Experience We need A method to choose actions Some model to keep track of and learn Value Function 45
46 TD Learning Temporal Difference (TD) Learning: Initialise V for all s in S For each experience tuple (s,r,s ) under policy : Update V: estimated return (TD target) TD error 46 (T,R,S,A)
47 Eligibility traces - Keep track of where agent has been - More efficient updates 47
48 TD(0) TD(0) Learning: Initialise V for all s For each trajectory/episode: for all s e(s) = 0 for each experience tuple (s,r,s ) under policy e(s) = e(s) + 1 for all s in S e(s) = 0 We are back to normal TD Learning. 48 (T,R,S,A) in episode:
49 TD rollouts (T,R,S,A) 49
50 TD(1) TD(1) Learning: Initialise V for all s For each trajectory/episode: for all s e(s) = 0 for each experience tuple (s,r,s ) under policy in episode: e(s) = e(s) + 1 Mark whole trajectory for all s in S e(s) = γe(s) Decay trace 50 (T,R,S,A)
51 Tuning the decay TD(0) TD(1) No traces Traces decay with γ TD( ) Control the decay rate 51
52 TD( ) TD( ) Learning: Initialise V for all s For each trajectory/episode: for all s e(s) = 0 for each experience tuple (s,r,s ) under policy e(s) = e(s) + 1 for all s in S e(s) = γ e(s) Control the speed of decay 52 (T,R,S,A) in episode:
53 Intermission 15 minutes 53
54 Onwards from TD Recap: we can now learn by estimating V from experience But: Not using actions A We would rather learn Q, for easier policy extraction! V requires a one-step lookahead model 54
55 SARSA Learn from s, a, r, s, a Initialise Q for all s, a For each episode Initialise Choose in from Q act For each step t in episode look ahead Take, observe Choose in from Q 55 (T,R,S,A) learn
56 SARSA Where did we get the? Taking the next action under Q This is an on policy algorithm What about off policy? Learn about optimal policy while exploring Reuse experience from other policies Learn from observations 56 (T,R,S,A)
57 Q-Learning Initialise Q for all s, a For each episode Initialise For each step t in episode Choose in from Q Take, observe 57 (T,R,S,A) act learn take best next action (so far)
58 Q-Learning demo (T,R,S,A) Shreyas Skandan: 58
59 Typical Learning Curves 59

60 Generalising... What about extending behaviour to different tasks? What about building a simulator? Ask questions about the domain Solution: we need a model!!! 60
61 Model Based Methods 61

62 From Values to Environment Models Model based reinforcement learning Learn a model (T and R) from experience Supervised learning problem Models let you predict next state and reward Reason about uncertainty 62
63 Algorithm setup (T,R,S,A) Model Based RL: No Transition Model No Reward Model Access to environment for experiment or access to training data (s,a,r,s ) Goal: Learn Transition and Reward Models Policy through learned models. 63
64 Model Based RL (T,R,S,A) Learn a Transition and Reward Model On receiving experience 64 :
 Get r and s from model Update Q: sample model to update")
65 Dyna Q Algorithm For each step t in episode Choose in from Q Take, observe Update Q: Given Update T and R 65 Q-learning model update Repeat n times: Sample previously observed s Sample previously taken a (in s) Get r and s from model Update Q: sample model to update Q

66 What else can I do with a model? Quantify uncertainty in value functions Uncertainty from: Data sparsity Inherent stochasticity Latent structure Approaches: Monte Carlo sampling Simulation 66

67 A little bit of overkill? Ok, so we ve gone to all this trouble to learn T, R Q Can t we just learn the policy? 67
68 Policy Search 68
69 Algorithm setup (T,R,S,A) Direct Policy Learning: No Transition Model No Reward Model Access to environment for experiment or access to training data (s,a,r,s ) Goal: Learn policy directly 69

70 Policy Gradient Parametrise policy: Choices: Linear combination of basis functions Set of state features Deep neural network Goal: find best Optimisation problem! 70
71 Optimising the policy Define cost function J( ): Start value, average reward per time step Find that maximises J( ) e.g. gradient ascent on: policy gradient 71
72 Why policy gradient? + High-dimensional action spaces + Continuous action spaces + Many recent successes in robotics - Local convergence - Policy evaluation high variance 72
73 Recap - RL Approaches Policy Search Value Function Based Model Based s sa sa Q T, R a s r a 73
74 Inverse Reinforcement Learning 74
75 Inferring a Reward Function Designing reward functions is hard! Often not clear what should be done or how it should be rewarded Where do these come from? Learn the incentives that explain observed behaviour From an expert 75 We do not observe the reward, but want to learn it
76 Inverse Reinforcement Learning Environment Reward 76 RL Policy/ Behaviour
77 Inverse Reinforcement Learning Environment Reward 77 IRL Policy/ Behaviour
 Goal: Learn a reward model to explain the behaviour observed through the")
78 Algorithm setup (T,R,S,A) Inverse RL: Transition Model (Can be learned) No Reward Model Observe training data (s,a,s ) Goal: Learn a reward model to explain the behaviour observed through the training data 78
79 IRL: From paths to rewards Observe trajectory/trajectories (s,a,s ) Would like to know: What was the goal of the agent? What was the reward? Get to G and avoid water? 79
 Calculate")
80 Maximum Likelihood IRL Possible reward function 80 ML IRL Algorithm (Intuition): Given sample trajectories D Initialise a reward function R Calculate policy from R, T Calculate P(D ) Calculate gradient, update R

81 IRL: From paths to rewards What about different teachers? Information not in the data when we get it. MLIRL with multiple intentions!!! 81 M Babes et. al. Apprenticeship learning about multiple intentions

82 IRL Learn from demonstration Crowdsourcing Showing tasks to robots Learning from experts 82
83 (Some) Reinforcement Learning Applications 83
84 Application Areas Randomised Controlled Trials Efficacy in Sequential Multiple Assignment Randomized Trial 84 An Introduction to Dynamic Treatment Regimes: Marie Davidian
85 Application Areas Advertising :( Nuff Said!!! 85


86 Application Areas Strategies to Improve Donations or Collecting Taxes :) 86 Tax Collections Optimization for New York State - Gerard Miller et. al.



87 Application Areas Mobile Health Interventions 87 Experimental Design & Machine Learning Opportunities in Mobile Health: Susan Murphy
88 HIV Treatment: Possible Formulation Features: baseline viral load, CD4 count, baseline CD4 percentage, Age, # previous treatments. States: Viral Load tracked monthly over 24 months. Patient s treatment stage bins for the viral load, in copies/ml, were [0.0,50,100,1K,100K]. Actions: Therapy/drug cocktail groups occurring in the data set. Reward: Negated AUC 88 V Marivate: Improved empirical methods in reinforcement-learning evaluation





89 Application Areas Robotics: learning behaviours 89
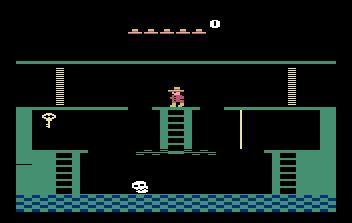


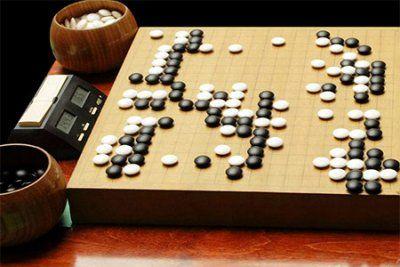
90 RL Application Areas Games Standardised testbeds Long decision horizons 90



91 Application Areas Automated Trading 1: 91 2:??? 3:


92 Thank you + Resources 2nd Edition Draft Recommended. Draft available online sutton/book/the-book-2nd. html 92 RL class: earning--ud600 Vukosi Marivate and Benjamin Rosman vmarivate@csir.co.za, brosman@csir.co.za
Lecture 10: Reinforcement Learning
 Lecture 1: Reinforcement Learning Cognitive Systems II - Machine Learning SS 25 Part III: Learning Programs and Strategies Q Learning, Dynamic Programming Lecture 1: Reinforcement Learning p. Motivation
Lecture 1: Reinforcement Learning Cognitive Systems II - Machine Learning SS 25 Part III: Learning Programs and Strategies Q Learning, Dynamic Programming Lecture 1: Reinforcement Learning p. Motivation
Reinforcement Learning by Comparing Immediate Reward
 Reinforcement Learning by Comparing Immediate Reward Punit Pandey DeepshikhaPandey Dr. Shishir Kumar Abstract This paper introduces an approach to Reinforcement Learning Algorithm by comparing their immediate
Reinforcement Learning by Comparing Immediate Reward Punit Pandey DeepshikhaPandey Dr. Shishir Kumar Abstract This paper introduces an approach to Reinforcement Learning Algorithm by comparing their immediate
Exploration. CS : Deep Reinforcement Learning Sergey Levine
 Exploration CS 294-112: Deep Reinforcement Learning Sergey Levine Class Notes 1. Homework 4 due on Wednesday 2. Project proposal feedback sent Today s Lecture 1. What is exploration? Why is it a problem?
Exploration CS 294-112: Deep Reinforcement Learning Sergey Levine Class Notes 1. Homework 4 due on Wednesday 2. Project proposal feedback sent Today s Lecture 1. What is exploration? Why is it a problem?
ISFA2008U_120 A SCHEDULING REINFORCEMENT LEARNING ALGORITHM
 Proceedings of 28 ISFA 28 International Symposium on Flexible Automation Atlanta, GA, USA June 23-26, 28 ISFA28U_12 A SCHEDULING REINFORCEMENT LEARNING ALGORITHM Amit Gil, Helman Stern, Yael Edan, and
Proceedings of 28 ISFA 28 International Symposium on Flexible Automation Atlanta, GA, USA June 23-26, 28 ISFA28U_12 A SCHEDULING REINFORCEMENT LEARNING ALGORITHM Amit Gil, Helman Stern, Yael Edan, and
Lecture 1: Machine Learning Basics
 1/69 Lecture 1: Machine Learning Basics Ali Harakeh University of Waterloo WAVE Lab ali.harakeh@uwaterloo.ca May 1, 2017 2/69 Overview 1 Learning Algorithms 2 Capacity, Overfitting, and Underfitting 3
1/69 Lecture 1: Machine Learning Basics Ali Harakeh University of Waterloo WAVE Lab ali.harakeh@uwaterloo.ca May 1, 2017 2/69 Overview 1 Learning Algorithms 2 Capacity, Overfitting, and Underfitting 3
Georgetown University at TREC 2017 Dynamic Domain Track
 Georgetown University at TREC 2017 Dynamic Domain Track Zhiwen Tang Georgetown University zt79@georgetown.edu Grace Hui Yang Georgetown University huiyang@cs.georgetown.edu Abstract TREC Dynamic Domain
Georgetown University at TREC 2017 Dynamic Domain Track Zhiwen Tang Georgetown University zt79@georgetown.edu Grace Hui Yang Georgetown University huiyang@cs.georgetown.edu Abstract TREC Dynamic Domain
Python Machine Learning
 Python Machine Learning Unlock deeper insights into machine learning with this vital guide to cuttingedge predictive analytics Sebastian Raschka [ PUBLISHING 1 open source I community experience distilled
Python Machine Learning Unlock deeper insights into machine learning with this vital guide to cuttingedge predictive analytics Sebastian Raschka [ PUBLISHING 1 open source I community experience distilled
Laboratorio di Intelligenza Artificiale e Robotica
 Laboratorio di Intelligenza Artificiale e Robotica A.A. 2008-2009 Outline 2 Machine Learning Unsupervised Learning Supervised Learning Reinforcement Learning Genetic Algorithms Genetics-Based Machine Learning
Laboratorio di Intelligenza Artificiale e Robotica A.A. 2008-2009 Outline 2 Machine Learning Unsupervised Learning Supervised Learning Reinforcement Learning Genetic Algorithms Genetics-Based Machine Learning
Module 12. Machine Learning. Version 2 CSE IIT, Kharagpur
 Module 12 Machine Learning 12.1 Instructional Objective The students should understand the concept of learning systems Students should learn about different aspects of a learning system Students should
Module 12 Machine Learning 12.1 Instructional Objective The students should understand the concept of learning systems Students should learn about different aspects of a learning system Students should
AMULTIAGENT system [1] can be defined as a group of
![AMULTIAGENT system [1] can be defined as a group of](/thumbs/71/65976880.jpg "AMULTIAGENT system [1] can be defined as a group of") 156 IEEE TRANSACTIONS ON SYSTEMS, MAN, AND CYBERNETICS PART C: APPLICATIONS AND REVIEWS, VOL. 38, NO. 2, MARCH 2008 A Comprehensive Survey of Multiagent Reinforcement Learning Lucian Buşoniu, Robert Babuška,
156 IEEE TRANSACTIONS ON SYSTEMS, MAN, AND CYBERNETICS PART C: APPLICATIONS AND REVIEWS, VOL. 38, NO. 2, MARCH 2008 A Comprehensive Survey of Multiagent Reinforcement Learning Lucian Buşoniu, Robert Babuška,
Challenges in Deep Reinforcement Learning. Sergey Levine UC Berkeley
 Challenges in Deep Reinforcement Learning Sergey Levine UC Berkeley Discuss some recent work in deep reinforcement learning Present a few major challenges Show some of our recent work toward tackling
Challenges in Deep Reinforcement Learning Sergey Levine UC Berkeley Discuss some recent work in deep reinforcement learning Present a few major challenges Show some of our recent work toward tackling
Artificial Neural Networks written examination
 1 (8) Institutionen för informationsteknologi Olle Gällmo Universitetsadjunkt Adress: Lägerhyddsvägen 2 Box 337 751 05 Uppsala Artificial Neural Networks written examination Monday, May 15, 2006 9 00-14
1 (8) Institutionen för informationsteknologi Olle Gällmo Universitetsadjunkt Adress: Lägerhyddsvägen 2 Box 337 751 05 Uppsala Artificial Neural Networks written examination Monday, May 15, 2006 9 00-14
Axiom 2013 Team Description Paper
 Axiom 2013 Team Description Paper Mohammad Ghazanfari, S Omid Shirkhorshidi, Farbod Samsamipour, Hossein Rahmatizadeh Zagheli, Mohammad Mahdavi, Payam Mohajeri, S Abbas Alamolhoda Robotics Scientific Association
Axiom 2013 Team Description Paper Mohammad Ghazanfari, S Omid Shirkhorshidi, Farbod Samsamipour, Hossein Rahmatizadeh Zagheli, Mohammad Mahdavi, Payam Mohajeri, S Abbas Alamolhoda Robotics Scientific Association
High-level Reinforcement Learning in Strategy Games
 High-level Reinforcement Learning in Strategy Games Christopher Amato Department of Computer Science University of Massachusetts Amherst, MA 01003 USA camato@cs.umass.edu Guy Shani Department of Computer
High-level Reinforcement Learning in Strategy Games Christopher Amato Department of Computer Science University of Massachusetts Amherst, MA 01003 USA camato@cs.umass.edu Guy Shani Department of Computer
Speeding Up Reinforcement Learning with Behavior Transfer
 Speeding Up Reinforcement Learning with Behavior Transfer Matthew E. Taylor and Peter Stone Department of Computer Sciences The University of Texas at Austin Austin, Texas 78712-1188 {mtaylor, pstone}@cs.utexas.edu
Speeding Up Reinforcement Learning with Behavior Transfer Matthew E. Taylor and Peter Stone Department of Computer Sciences The University of Texas at Austin Austin, Texas 78712-1188 {mtaylor, pstone}@cs.utexas.edu
Task Completion Transfer Learning for Reward Inference
 Machine Learning for Interactive Systems: Papers from the AAAI-14 Workshop Task Completion Transfer Learning for Reward Inference Layla El Asri 1,2, Romain Laroche 1, Olivier Pietquin 3 1 Orange Labs,
Machine Learning for Interactive Systems: Papers from the AAAI-14 Workshop Task Completion Transfer Learning for Reward Inference Layla El Asri 1,2, Romain Laroche 1, Olivier Pietquin 3 1 Orange Labs,
Laboratorio di Intelligenza Artificiale e Robotica
 Laboratorio di Intelligenza Artificiale e Robotica A.A. 2008-2009 Outline 2 Machine Learning Unsupervised Learning Supervised Learning Reinforcement Learning Genetic Algorithms Genetics-Based Machine Learning
Laboratorio di Intelligenza Artificiale e Robotica A.A. 2008-2009 Outline 2 Machine Learning Unsupervised Learning Supervised Learning Reinforcement Learning Genetic Algorithms Genetics-Based Machine Learning
TD(λ) and Q-Learning Based Ludo Players
 and Q-Learning Based Ludo Players") TD(λ) and Q-Learning Based Ludo Players Majed Alhajry, Faisal Alvi, Member, IEEE and Moataz Ahmed Abstract Reinforcement learning is a popular machine learning technique whose inherent self-learning ability
TD(λ) and Q-Learning Based Ludo Players Majed Alhajry, Faisal Alvi, Member, IEEE and Moataz Ahmed Abstract Reinforcement learning is a popular machine learning technique whose inherent self-learning ability
Introduction to Simulation
 Introduction to Simulation Spring 2010 Dr. Louis Luangkesorn University of Pittsburgh January 19, 2010 Dr. Louis Luangkesorn ( University of Pittsburgh ) Introduction to Simulation January 19, 2010 1 /
Introduction to Simulation Spring 2010 Dr. Louis Luangkesorn University of Pittsburgh January 19, 2010 Dr. Louis Luangkesorn ( University of Pittsburgh ) Introduction to Simulation January 19, 2010 1 /
Intelligent Agents. Chapter 2. Chapter 2 1
 Intelligent Agents Chapter 2 Chapter 2 1 Outline Agents and environments Rationality PEAS (Performance measure, Environment, Actuators, Sensors) Environment types The structure of agents Chapter 2 2 Agents
Intelligent Agents Chapter 2 Chapter 2 1 Outline Agents and environments Rationality PEAS (Performance measure, Environment, Actuators, Sensors) Environment types The structure of agents Chapter 2 2 Agents
Regret-based Reward Elicitation for Markov Decision Processes
 444 REGAN & BOUTILIER UAI 2009 Regret-based Reward Elicitation for Markov Decision Processes Kevin Regan Department of Computer Science University of Toronto Toronto, ON, CANADA kmregan@cs.toronto.edu
444 REGAN & BOUTILIER UAI 2009 Regret-based Reward Elicitation for Markov Decision Processes Kevin Regan Department of Computer Science University of Toronto Toronto, ON, CANADA kmregan@cs.toronto.edu
Continual Curiosity-Driven Skill Acquisition from High-Dimensional Video Inputs for Humanoid Robots
 Continual Curiosity-Driven Skill Acquisition from High-Dimensional Video Inputs for Humanoid Robots Varun Raj Kompella, Marijn Stollenga, Matthew Luciw, Juergen Schmidhuber The Swiss AI Lab IDSIA, USI
Continual Curiosity-Driven Skill Acquisition from High-Dimensional Video Inputs for Humanoid Robots Varun Raj Kompella, Marijn Stollenga, Matthew Luciw, Juergen Schmidhuber The Swiss AI Lab IDSIA, USI
Task Completion Transfer Learning for Reward Inference
 Task Completion Transfer Learning for Reward Inference Layla El Asri 1,2, Romain Laroche 1, Olivier Pietquin 3 1 Orange Labs, Issy-les-Moulineaux, France 2 UMI 2958 (CNRS - GeorgiaTech), France 3 University
Task Completion Transfer Learning for Reward Inference Layla El Asri 1,2, Romain Laroche 1, Olivier Pietquin 3 1 Orange Labs, Issy-les-Moulineaux, France 2 UMI 2958 (CNRS - GeorgiaTech), France 3 University
FF+FPG: Guiding a Policy-Gradient Planner
 FF+FPG: Guiding a Policy-Gradient Planner Olivier Buffet LAAS-CNRS University of Toulouse Toulouse, France firstname.lastname@laas.fr Douglas Aberdeen National ICT australia & The Australian National University
FF+FPG: Guiding a Policy-Gradient Planner Olivier Buffet LAAS-CNRS University of Toulouse Toulouse, France firstname.lastname@laas.fr Douglas Aberdeen National ICT australia & The Australian National University
Session 2B From understanding perspectives to informing public policy the potential and challenges for Q findings to inform survey design
 Session 2B From understanding perspectives to informing public policy the potential and challenges for Q findings to inform survey design Paper #3 Five Q-to-survey approaches: did they work? Job van Exel
Session 2B From understanding perspectives to informing public policy the potential and challenges for Q findings to inform survey design Paper #3 Five Q-to-survey approaches: did they work? Job van Exel
Chapter 2. Intelligent Agents. Outline. Agents and environments. Rationality. PEAS (Performance measure, Environment, Actuators, Sensors)
") Intelligent Agents Chapter 2 1 Outline Agents and environments Rationality PEAS (Performance measure, Environment, Actuators, Sensors) Agent types 2 Agents and environments sensors environment percepts
Intelligent Agents Chapter 2 1 Outline Agents and environments Rationality PEAS (Performance measure, Environment, Actuators, Sensors) Agent types 2 Agents and environments sensors environment percepts
Seminar - Organic Computing
 Seminar - Organic Computing Self-Organisation of OC-Systems Markus Franke 25.01.2006 Typeset by FoilTEX Timetable 1. Overview 2. Characteristics of SO-Systems 3. Concern with Nature 4. Design-Concepts
Seminar - Organic Computing Self-Organisation of OC-Systems Markus Franke 25.01.2006 Typeset by FoilTEX Timetable 1. Overview 2. Characteristics of SO-Systems 3. Concern with Nature 4. Design-Concepts
Improving Action Selection in MDP s via Knowledge Transfer
 In Proc. 20th National Conference on Artificial Intelligence (AAAI-05), July 9 13, 2005, Pittsburgh, USA. Improving Action Selection in MDP s via Knowledge Transfer Alexander A. Sherstov and Peter Stone
In Proc. 20th National Conference on Artificial Intelligence (AAAI-05), July 9 13, 2005, Pittsburgh, USA. Improving Action Selection in MDP s via Knowledge Transfer Alexander A. Sherstov and Peter Stone
Agents and environments. Intelligent Agents. Reminders. Vacuum-cleaner world. Outline. A vacuum-cleaner agent. Chapter 2 Actuators
 s and environments Percepts Intelligent s? Chapter 2 Actions s include humans, robots, softbots, thermostats, etc. The agent function maps from percept histories to actions: f : P A The agent program runs
s and environments Percepts Intelligent s? Chapter 2 Actions s include humans, robots, softbots, thermostats, etc. The agent function maps from percept histories to actions: f : P A The agent program runs
A Reinforcement Learning Variant for Control Scheduling
 A Reinforcement Learning Variant for Control Scheduling Aloke Guha Honeywell Sensor and System Development Center 3660 Technology Drive Minneapolis MN 55417 Abstract We present an algorithm based on reinforcement
A Reinforcement Learning Variant for Control Scheduling Aloke Guha Honeywell Sensor and System Development Center 3660 Technology Drive Minneapolis MN 55417 Abstract We present an algorithm based on reinforcement
Semi-Supervised GMM and DNN Acoustic Model Training with Multi-system Combination and Confidence Re-calibration
 INTERSPEECH 2013 Semi-Supervised GMM and DNN Acoustic Model Training with Multi-system Combination and Confidence Re-calibration Yan Huang, Dong Yu, Yifan Gong, and Chaojun Liu Microsoft Corporation, One
INTERSPEECH 2013 Semi-Supervised GMM and DNN Acoustic Model Training with Multi-system Combination and Confidence Re-calibration Yan Huang, Dong Yu, Yifan Gong, and Chaojun Liu Microsoft Corporation, One
Learning Prospective Robot Behavior
 Learning Prospective Robot Behavior Shichao Ou and Rod Grupen Laboratory for Perceptual Robotics Computer Science Department University of Massachusetts Amherst {chao,grupen}@cs.umass.edu Abstract This
Learning Prospective Robot Behavior Shichao Ou and Rod Grupen Laboratory for Perceptual Robotics Computer Science Department University of Massachusetts Amherst {chao,grupen}@cs.umass.edu Abstract This
Learning Optimal Dialogue Strategies: A Case Study of a Spoken Dialogue Agent for
 Learning Optimal Dialogue Strategies: A Case Study of a Spoken Dialogue Agent for Email Marilyn A. Walker Jeanne C. Fromer Shrikanth Narayanan walker@research.att.com jeannie@ai.mit.edu shri@research.att.com
Learning Optimal Dialogue Strategies: A Case Study of a Spoken Dialogue Agent for Email Marilyn A. Walker Jeanne C. Fromer Shrikanth Narayanan walker@research.att.com jeannie@ai.mit.edu shri@research.att.com
Machine Learning and Data Mining. Ensembles of Learners. Prof. Alexander Ihler
 Machine Learning and Data Mining Ensembles of Learners Prof. Alexander Ihler Ensemble methods Why learn one classifier when you can learn many? Ensemble: combine many predictors (Weighted) combina
Machine Learning and Data Mining Ensembles of Learners Prof. Alexander Ihler Ensemble methods Why learn one classifier when you can learn many? Ensemble: combine many predictors (Weighted) combina
IAT 888: Metacreation Machines endowed with creative behavior. Philippe Pasquier Office 565 (floor 14)
") IAT 888: Metacreation Machines endowed with creative behavior Philippe Pasquier Office 565 (floor 14) pasquier@sfu.ca Outline of today's lecture A little bit about me A little bit about you What will that
IAT 888: Metacreation Machines endowed with creative behavior Philippe Pasquier Office 565 (floor 14) pasquier@sfu.ca Outline of today's lecture A little bit about me A little bit about you What will that
Transfer Learning Action Models by Measuring the Similarity of Different Domains
 Transfer Learning Action Models by Measuring the Similarity of Different Domains Hankui Zhuo 1, Qiang Yang 2, and Lei Li 1 1 Software Research Institute, Sun Yat-sen University, Guangzhou, China. zhuohank@gmail.com,lnslilei@mail.sysu.edu.cn
Transfer Learning Action Models by Measuring the Similarity of Different Domains Hankui Zhuo 1, Qiang Yang 2, and Lei Li 1 1 Software Research Institute, Sun Yat-sen University, Guangzhou, China. zhuohank@gmail.com,lnslilei@mail.sysu.edu.cn
Learning Human Utility from Video Demonstrations for Deductive Planning in Robotics
 Learning Human Utility from Video Demonstrations for Deductive Planning in Robotics Nishant Shukla, Yunzhong He, Frank Chen, and Song-Chun Zhu Center for Vision, Cognition, Learning, and Autonomy University
Learning Human Utility from Video Demonstrations for Deductive Planning in Robotics Nishant Shukla, Yunzhong He, Frank Chen, and Song-Chun Zhu Center for Vision, Cognition, Learning, and Autonomy University
System Implementation for SemEval-2017 Task 4 Subtask A Based on Interpolated Deep Neural Networks
 System Implementation for SemEval-2017 Task 4 Subtask A Based on Interpolated Deep Neural Networks 1 Tzu-Hsuan Yang, 2 Tzu-Hsuan Tseng, and 3 Chia-Ping Chen Department of Computer Science and Engineering
System Implementation for SemEval-2017 Task 4 Subtask A Based on Interpolated Deep Neural Networks 1 Tzu-Hsuan Yang, 2 Tzu-Hsuan Tseng, and 3 Chia-Ping Chen Department of Computer Science and Engineering
University of Cincinnati College of Medicine. DECISION ANALYSIS AND COST-EFFECTIVENESS BE-7068C: Spring 2016
 1 DECISION ANALYSIS AND COST-EFFECTIVENESS BE-7068C: Spring 2016 Instructor Name: Mark H. Eckman, MD, MS Office:, Division of General Internal Medicine (MSB 7564) (ML#0535) Cincinnati, Ohio 45267-0535
1 DECISION ANALYSIS AND COST-EFFECTIVENESS BE-7068C: Spring 2016 Instructor Name: Mark H. Eckman, MD, MS Office:, Division of General Internal Medicine (MSB 7564) (ML#0535) Cincinnati, Ohio 45267-0535
Generative models and adversarial training
 Day 4 Lecture 1 Generative models and adversarial training Kevin McGuinness kevin.mcguinness@dcu.ie Research Fellow Insight Centre for Data Analytics Dublin City University What is a generative model?
Day 4 Lecture 1 Generative models and adversarial training Kevin McGuinness kevin.mcguinness@dcu.ie Research Fellow Insight Centre for Data Analytics Dublin City University What is a generative model?
Robot Learning Simultaneously a Task and How to Interpret Human Instructions
 Robot Learning Simultaneously a Task and How to Interpret Human Instructions Jonathan Grizou, Manuel Lopes, Pierre-Yves Oudeyer To cite this version: Jonathan Grizou, Manuel Lopes, Pierre-Yves Oudeyer.
Robot Learning Simultaneously a Task and How to Interpret Human Instructions Jonathan Grizou, Manuel Lopes, Pierre-Yves Oudeyer To cite this version: Jonathan Grizou, Manuel Lopes, Pierre-Yves Oudeyer.
Learning and Transferring Relational Instance-Based Policies
 Learning and Transferring Relational Instance-Based Policies Rocío García-Durán, Fernando Fernández y Daniel Borrajo Universidad Carlos III de Madrid Avda de la Universidad 30, 28911-Leganés (Madrid),
Learning and Transferring Relational Instance-Based Policies Rocío García-Durán, Fernando Fernández y Daniel Borrajo Universidad Carlos III de Madrid Avda de la Universidad 30, 28911-Leganés (Madrid),
Rule Learning With Negation: Issues Regarding Effectiveness
 Rule Learning With Negation: Issues Regarding Effectiveness S. Chua, F. Coenen, G. Malcolm University of Liverpool Department of Computer Science, Ashton Building, Ashton Street, L69 3BX Liverpool, United
Rule Learning With Negation: Issues Regarding Effectiveness S. Chua, F. Coenen, G. Malcolm University of Liverpool Department of Computer Science, Ashton Building, Ashton Street, L69 3BX Liverpool, United
A Comparison of Annealing Techniques for Academic Course Scheduling
 A Comparison of Annealing Techniques for Academic Course Scheduling M. A. Saleh Elmohamed 1, Paul Coddington 2, and Geoffrey Fox 1 1 Northeast Parallel Architectures Center Syracuse University, Syracuse,
A Comparison of Annealing Techniques for Academic Course Scheduling M. A. Saleh Elmohamed 1, Paul Coddington 2, and Geoffrey Fox 1 1 Northeast Parallel Architectures Center Syracuse University, Syracuse,
The 9 th International Scientific Conference elearning and software for Education Bucharest, April 25-26, / X
 The 9 th International Scientific Conference elearning and software for Education Bucharest, April 25-26, 2013 10.12753/2066-026X-13-154 DATA MINING SOLUTIONS FOR DETERMINING STUDENT'S PROFILE Adela BÂRA,
The 9 th International Scientific Conference elearning and software for Education Bucharest, April 25-26, 2013 10.12753/2066-026X-13-154 DATA MINING SOLUTIONS FOR DETERMINING STUDENT'S PROFILE Adela BÂRA,
Testing A Moving Target: How Do We Test Machine Learning Systems? Peter Varhol Technology Strategy Research, USA
 Testing A Moving Target: How Do We Test Machine Learning Systems? Peter Varhol Technology Strategy Research, USA Testing a Moving Target How Do We Test Machine Learning Systems? Peter Varhol, Technology
Testing A Moving Target: How Do We Test Machine Learning Systems? Peter Varhol Technology Strategy Research, USA Testing a Moving Target How Do We Test Machine Learning Systems? Peter Varhol, Technology
Mathematics subject curriculum
 Mathematics subject curriculum Dette er ei omsetjing av den fastsette læreplanteksten. Læreplanen er fastsett på Nynorsk Established as a Regulation by the Ministry of Education and Research on 24 June
Mathematics subject curriculum Dette er ei omsetjing av den fastsette læreplanteksten. Læreplanen er fastsett på Nynorsk Established as a Regulation by the Ministry of Education and Research on 24 June
Teachable Robots: Understanding Human Teaching Behavior to Build More Effective Robot Learners
 Teachable Robots: Understanding Human Teaching Behavior to Build More Effective Robot Learners Andrea L. Thomaz and Cynthia Breazeal Abstract While Reinforcement Learning (RL) is not traditionally designed
Teachable Robots: Understanding Human Teaching Behavior to Build More Effective Robot Learners Andrea L. Thomaz and Cynthia Breazeal Abstract While Reinforcement Learning (RL) is not traditionally designed
Model Ensemble for Click Prediction in Bing Search Ads
 Model Ensemble for Click Prediction in Bing Search Ads Xiaoliang Ling Microsoft Bing xiaoling@microsoft.com Hucheng Zhou Microsoft Research huzho@microsoft.com Weiwei Deng Microsoft Bing dedeng@microsoft.com
Model Ensemble for Click Prediction in Bing Search Ads Xiaoliang Ling Microsoft Bing xiaoling@microsoft.com Hucheng Zhou Microsoft Research huzho@microsoft.com Weiwei Deng Microsoft Bing dedeng@microsoft.com
An OO Framework for building Intelligence and Learning properties in Software Agents
 An OO Framework for building Intelligence and Learning properties in Software Agents José A. R. P. Sardinha, Ruy L. Milidiú, Carlos J. P. Lucena, Patrick Paranhos Abstract Software agents are defined as
An OO Framework for building Intelligence and Learning properties in Software Agents José A. R. P. Sardinha, Ruy L. Milidiú, Carlos J. P. Lucena, Patrick Paranhos Abstract Software agents are defined as
EVOLVING POLICIES TO SOLVE THE RUBIK S CUBE: EXPERIMENTS WITH IDEAL AND APPROXIMATE PERFORMANCE FUNCTIONS
 EVOLVING POLICIES TO SOLVE THE RUBIK S CUBE: EXPERIMENTS WITH IDEAL AND APPROXIMATE PERFORMANCE FUNCTIONS by Robert Smith Submitted in partial fulfillment of the requirements for the degree of Master of
EVOLVING POLICIES TO SOLVE THE RUBIK S CUBE: EXPERIMENTS WITH IDEAL AND APPROXIMATE PERFORMANCE FUNCTIONS by Robert Smith Submitted in partial fulfillment of the requirements for the degree of Master of
Lecture 6: Applications
 Lecture 6: Applications Michael L. Littman Rutgers University Department of Computer Science Rutgers Laboratory for Real-Life Reinforcement Learning What is RL? Branch of machine learning concerned with
Lecture 6: Applications Michael L. Littman Rutgers University Department of Computer Science Rutgers Laboratory for Real-Life Reinforcement Learning What is RL? Branch of machine learning concerned with
Probabilistic Latent Semantic Analysis
 Probabilistic Latent Semantic Analysis Thomas Hofmann Presentation by Ioannis Pavlopoulos & Andreas Damianou for the course of Data Mining & Exploration 1 Outline Latent Semantic Analysis o Need o Overview
Probabilistic Latent Semantic Analysis Thomas Hofmann Presentation by Ioannis Pavlopoulos & Andreas Damianou for the course of Data Mining & Exploration 1 Outline Latent Semantic Analysis o Need o Overview
Truth Inference in Crowdsourcing: Is the Problem Solved?
 Truth Inference in Crowdsourcing: Is the Problem Solved? Yudian Zheng, Guoliang Li #, Yuanbing Li #, Caihua Shan, Reynold Cheng # Department of Computer Science, Tsinghua University Department of Computer
Truth Inference in Crowdsourcing: Is the Problem Solved? Yudian Zheng, Guoliang Li #, Yuanbing Li #, Caihua Shan, Reynold Cheng # Department of Computer Science, Tsinghua University Department of Computer
CS Machine Learning
 CS 478 - Machine Learning Projects Data Representation Basic testing and evaluation schemes CS 478 Data and Testing 1 Programming Issues l Program in any platform you want l Realize that you will be doing
CS 478 - Machine Learning Projects Data Representation Basic testing and evaluation schemes CS 478 Data and Testing 1 Programming Issues l Program in any platform you want l Realize that you will be doing
Stopping rules for sequential trials in high-dimensional data
 Stopping rules for sequential trials in high-dimensional data Sonja Zehetmayer, Alexandra Graf, and Martin Posch Center for Medical Statistics, Informatics and Intelligent Systems Medical University of
Stopping rules for sequential trials in high-dimensional data Sonja Zehetmayer, Alexandra Graf, and Martin Posch Center for Medical Statistics, Informatics and Intelligent Systems Medical University of
Go fishing! Responsibility judgments when cooperation breaks down
 Go fishing! Responsibility judgments when cooperation breaks down Kelsey Allen (krallen@mit.edu), Julian Jara-Ettinger (jjara@mit.edu), Tobias Gerstenberg (tger@mit.edu), Max Kleiman-Weiner (maxkw@mit.edu)
Go fishing! Responsibility judgments when cooperation breaks down Kelsey Allen (krallen@mit.edu), Julian Jara-Ettinger (jjara@mit.edu), Tobias Gerstenberg (tger@mit.edu), Max Kleiman-Weiner (maxkw@mit.edu)
Unsupervised Learning of Word Semantic Embedding using the Deep Structured Semantic Model
 Unsupervised Learning of Word Semantic Embedding using the Deep Structured Semantic Model Xinying Song, Xiaodong He, Jianfeng Gao, Li Deng Microsoft Research, One Microsoft Way, Redmond, WA 98052, U.S.A.
Unsupervised Learning of Word Semantic Embedding using the Deep Structured Semantic Model Xinying Song, Xiaodong He, Jianfeng Gao, Li Deng Microsoft Research, One Microsoft Way, Redmond, WA 98052, U.S.A.
QuickStroke: An Incremental On-line Chinese Handwriting Recognition System
 QuickStroke: An Incremental On-line Chinese Handwriting Recognition System Nada P. Matić John C. Platt Λ Tony Wang y Synaptics, Inc. 2381 Bering Drive San Jose, CA 95131, USA Abstract This paper presents
QuickStroke: An Incremental On-line Chinese Handwriting Recognition System Nada P. Matić John C. Platt Λ Tony Wang y Synaptics, Inc. 2381 Bering Drive San Jose, CA 95131, USA Abstract This paper presents
Softprop: Softmax Neural Network Backpropagation Learning
 Softprop: Softmax Neural Networ Bacpropagation Learning Michael Rimer Computer Science Department Brigham Young University Provo, UT 84602, USA E-mail: mrimer@axon.cs.byu.edu Tony Martinez Computer Science
Softprop: Softmax Neural Networ Bacpropagation Learning Michael Rimer Computer Science Department Brigham Young University Provo, UT 84602, USA E-mail: mrimer@axon.cs.byu.edu Tony Martinez Computer Science
Lecture 1: Basic Concepts of Machine Learning
 Lecture 1: Basic Concepts of Machine Learning Cognitive Systems - Machine Learning Ute Schmid (lecture) Johannes Rabold (practice) Based on slides prepared March 2005 by Maximilian Röglinger, updated 2010
Lecture 1: Basic Concepts of Machine Learning Cognitive Systems - Machine Learning Ute Schmid (lecture) Johannes Rabold (practice) Based on slides prepared March 2005 by Maximilian Röglinger, updated 2010
AI Agent for Ice Hockey Atari 2600
 AI Agent for Ice Hockey Atari 2600 Emman Kabaghe (emmank@stanford.edu) Rajarshi Roy (rroy@stanford.edu) 1 Introduction In the reinforcement learning (RL) problem an agent autonomously learns a behavior
AI Agent for Ice Hockey Atari 2600 Emman Kabaghe (emmank@stanford.edu) Rajarshi Roy (rroy@stanford.edu) 1 Introduction In the reinforcement learning (RL) problem an agent autonomously learns a behavior
Deep search. Enhancing a search bar using machine learning. Ilgün Ilgün & Cedric Reichenbach
 #BaselOne7 Deep search Enhancing a search bar using machine learning Ilgün Ilgün & Cedric Reichenbach We are not researchers Outline I. Periscope: A search tool II. Goals III. Deep learning IV. Applying
#BaselOne7 Deep search Enhancing a search bar using machine learning Ilgün Ilgün & Cedric Reichenbach We are not researchers Outline I. Periscope: A search tool II. Goals III. Deep learning IV. Applying
Designing a Rubric to Assess the Modelling Phase of Student Design Projects in Upper Year Engineering Courses
 Designing a Rubric to Assess the Modelling Phase of Student Design Projects in Upper Year Engineering Courses Thomas F.C. Woodhall Masters Candidate in Civil Engineering Queen s University at Kingston,
Designing a Rubric to Assess the Modelling Phase of Student Design Projects in Upper Year Engineering Courses Thomas F.C. Woodhall Masters Candidate in Civil Engineering Queen s University at Kingston,
Medical Complexity: A Pragmatic Theory
 http://eoimages.gsfc.nasa.gov/images/imagerecords/57000/57747/cloud_combined_2048.jpg Medical Complexity: A Pragmatic Theory Chris Feudtner, MD PhD MPH The Children s Hospital of Philadelphia Main Thesis
http://eoimages.gsfc.nasa.gov/images/imagerecords/57000/57747/cloud_combined_2048.jpg Medical Complexity: A Pragmatic Theory Chris Feudtner, MD PhD MPH The Children s Hospital of Philadelphia Main Thesis
Radius STEM Readiness TM
 Curriculum Guide Radius STEM Readiness TM While today s teens are surrounded by technology, we face a stark and imminent shortage of graduates pursuing careers in Science, Technology, Engineering, and
Curriculum Guide Radius STEM Readiness TM While today s teens are surrounded by technology, we face a stark and imminent shortage of graduates pursuing careers in Science, Technology, Engineering, and
*Net Perceptions, Inc West 78th Street Suite 300 Minneapolis, MN
 From: AAAI Technical Report WS-98-08. Compilation copyright 1998, AAAI (www.aaai.org). All rights reserved. Recommender Systems: A GroupLens Perspective Joseph A. Konstan *t, John Riedl *t, AI Borchers,
From: AAAI Technical Report WS-98-08. Compilation copyright 1998, AAAI (www.aaai.org). All rights reserved. Recommender Systems: A GroupLens Perspective Joseph A. Konstan *t, John Riedl *t, AI Borchers,
Rule Learning with Negation: Issues Regarding Effectiveness
 Rule Learning with Negation: Issues Regarding Effectiveness Stephanie Chua, Frans Coenen, and Grant Malcolm University of Liverpool Department of Computer Science, Ashton Building, Ashton Street, L69 3BX
Rule Learning with Negation: Issues Regarding Effectiveness Stephanie Chua, Frans Coenen, and Grant Malcolm University of Liverpool Department of Computer Science, Ashton Building, Ashton Street, L69 3BX
CSL465/603 - Machine Learning
 CSL465/603 - Machine Learning Fall 2016 Narayanan C Krishnan ckn@iitrpr.ac.in Introduction CSL465/603 - Machine Learning 1 Administrative Trivia Course Structure 3-0-2 Lecture Timings Monday 9.55-10.45am
CSL465/603 - Machine Learning Fall 2016 Narayanan C Krishnan ckn@iitrpr.ac.in Introduction CSL465/603 - Machine Learning 1 Administrative Trivia Course Structure 3-0-2 Lecture Timings Monday 9.55-10.45am
Software Maintenance
 1 What is Software Maintenance? Software Maintenance is a very broad activity that includes error corrections, enhancements of capabilities, deletion of obsolete capabilities, and optimization. 2 Categories
1 What is Software Maintenance? Software Maintenance is a very broad activity that includes error corrections, enhancements of capabilities, deletion of obsolete capabilities, and optimization. 2 Categories
Planning with External Events
 94 Planning with External Events Jim Blythe School of Computer Science Carnegie Mellon University Pittsburgh, PA 15213 blythe@cs.cmu.edu Abstract I describe a planning methodology for domains with uncertainty
94 Planning with External Events Jim Blythe School of Computer Science Carnegie Mellon University Pittsburgh, PA 15213 blythe@cs.cmu.edu Abstract I describe a planning methodology for domains with uncertainty
Learning Cases to Resolve Conflicts and Improve Group Behavior
 From: AAAI Technical Report WS-96-02. Compilation copyright 1996, AAAI (www.aaai.org). All rights reserved. Learning Cases to Resolve Conflicts and Improve Group Behavior Thomas Haynes and Sandip Sen Department
From: AAAI Technical Report WS-96-02. Compilation copyright 1996, AAAI (www.aaai.org). All rights reserved. Learning Cases to Resolve Conflicts and Improve Group Behavior Thomas Haynes and Sandip Sen Department
Learning Structural Correspondences Across Different Linguistic Domains with Synchronous Neural Language Models
 Learning Structural Correspondences Across Different Linguistic Domains with Synchronous Neural Language Models Stephan Gouws and GJ van Rooyen MIH Medialab, Stellenbosch University SOUTH AFRICA {stephan,gvrooyen}@ml.sun.ac.za
Learning Structural Correspondences Across Different Linguistic Domains with Synchronous Neural Language Models Stephan Gouws and GJ van Rooyen MIH Medialab, Stellenbosch University SOUTH AFRICA {stephan,gvrooyen}@ml.sun.ac.za
Learning to Schedule Straight-Line Code
 Learning to Schedule Straight-Line Code Eliot Moss, Paul Utgoff, John Cavazos Doina Precup, Darko Stefanović Dept. of Comp. Sci., Univ. of Mass. Amherst, MA 01003 Carla Brodley, David Scheeff Sch. of Elec.
Learning to Schedule Straight-Line Code Eliot Moss, Paul Utgoff, John Cavazos Doina Precup, Darko Stefanović Dept. of Comp. Sci., Univ. of Mass. Amherst, MA 01003 Carla Brodley, David Scheeff Sch. of Elec.
Managerial Decision Making
 Course Business Managerial Decision Making Session 4 Conditional Probability & Bayesian Updating Surveys in the future... attempt to participate is the important thing Work-load goals Average 6-7 hours,
Course Business Managerial Decision Making Session 4 Conditional Probability & Bayesian Updating Surveys in the future... attempt to participate is the important thing Work-load goals Average 6-7 hours,
arxiv: v2 [cs.ro] 3 Mar 2017
![arxiv: v2 [cs.ro] 3 Mar 2017](/thumbs/71/66179626.jpg "arxiv: v2 [cs.ro] 3 Mar 2017") Learning Feedback Terms for Reactive Planning and Control Akshara Rai 2,3,, Giovanni Sutanto 1,2,, Stefan Schaal 1,2 and Franziska Meier 1,2 arxiv:1610.03557v2 [cs.ro] 3 Mar 2017 Abstract With the advancement
Learning Feedback Terms for Reactive Planning and Control Akshara Rai 2,3,, Giovanni Sutanto 1,2,, Stefan Schaal 1,2 and Franziska Meier 1,2 arxiv:1610.03557v2 [cs.ro] 3 Mar 2017 Abstract With the advancement
Evolutive Neural Net Fuzzy Filtering: Basic Description
 Journal of Intelligent Learning Systems and Applications, 2010, 2: 12-18 doi:10.4236/jilsa.2010.21002 Published Online February 2010 (http://www.scirp.org/journal/jilsa) Evolutive Neural Net Fuzzy Filtering:
Journal of Intelligent Learning Systems and Applications, 2010, 2: 12-18 doi:10.4236/jilsa.2010.21002 Published Online February 2010 (http://www.scirp.org/journal/jilsa) Evolutive Neural Net Fuzzy Filtering:
On the Combined Behavior of Autonomous Resource Management Agents
 On the Combined Behavior of Autonomous Resource Management Agents Siri Fagernes 1 and Alva L. Couch 2 1 Faculty of Engineering Oslo University College Oslo, Norway siri.fagernes@iu.hio.no 2 Computer Science
On the Combined Behavior of Autonomous Resource Management Agents Siri Fagernes 1 and Alva L. Couch 2 1 Faculty of Engineering Oslo University College Oslo, Norway siri.fagernes@iu.hio.no 2 Computer Science
Using focal point learning to improve human machine tacit coordination
 DOI 10.1007/s10458-010-9126-5 Using focal point learning to improve human machine tacit coordination InonZuckerman SaritKraus Jeffrey S. Rosenschein The Author(s) 2010 Abstract We consider an automated
DOI 10.1007/s10458-010-9126-5 Using focal point learning to improve human machine tacit coordination InonZuckerman SaritKraus Jeffrey S. Rosenschein The Author(s) 2010 Abstract We consider an automated
Redirected Inbound Call Sampling An Example of Fit for Purpose Non-probability Sample Design
 Redirected Inbound Call Sampling An Example of Fit for Purpose Non-probability Sample Design Burton Levine Karol Krotki NISS/WSS Workshop on Inference from Nonprobability Samples September 25, 2017 RTI
Redirected Inbound Call Sampling An Example of Fit for Purpose Non-probability Sample Design Burton Levine Karol Krotki NISS/WSS Workshop on Inference from Nonprobability Samples September 25, 2017 RTI
ADVANCED MACHINE LEARNING WITH PYTHON BY JOHN HEARTY DOWNLOAD EBOOK : ADVANCED MACHINE LEARNING WITH PYTHON BY JOHN HEARTY PDF
 Read Online and Download Ebook ADVANCED MACHINE LEARNING WITH PYTHON BY JOHN HEARTY DOWNLOAD EBOOK : ADVANCED MACHINE LEARNING WITH PYTHON BY JOHN HEARTY PDF Click link bellow and free register to download
Read Online and Download Ebook ADVANCED MACHINE LEARNING WITH PYTHON BY JOHN HEARTY DOWNLOAD EBOOK : ADVANCED MACHINE LEARNING WITH PYTHON BY JOHN HEARTY PDF Click link bellow and free register to download
(Sub)Gradient Descent
Gradient Descent") (Sub)Gradient Descent CMSC 422 MARINE CARPUAT marine@cs.umd.edu Figures credit: Piyush Rai Logistics Midterm is on Thursday 3/24 during class time closed book/internet/etc, one page of notes. will include
(Sub)Gradient Descent CMSC 422 MARINE CARPUAT marine@cs.umd.edu Figures credit: Piyush Rai Logistics Midterm is on Thursday 3/24 during class time closed book/internet/etc, one page of notes. will include
Conceptual and Procedural Knowledge of a Mathematics Problem: Their Measurement and Their Causal Interrelations
 Conceptual and Procedural Knowledge of a Mathematics Problem: Their Measurement and Their Causal Interrelations Michael Schneider (mschneider@mpib-berlin.mpg.de) Elsbeth Stern (stern@mpib-berlin.mpg.de)
Conceptual and Procedural Knowledge of a Mathematics Problem: Their Measurement and Their Causal Interrelations Michael Schneider (mschneider@mpib-berlin.mpg.de) Elsbeth Stern (stern@mpib-berlin.mpg.de)
Historical maintenance relevant information roadmap for a self-learning maintenance prediction procedural approach
 IOP Conference Series: Materials Science and Engineering PAPER OPEN ACCESS Historical maintenance relevant information roadmap for a self-learning maintenance prediction procedural approach To cite this
IOP Conference Series: Materials Science and Engineering PAPER OPEN ACCESS Historical maintenance relevant information roadmap for a self-learning maintenance prediction procedural approach To cite this
ReinForest: Multi-Domain Dialogue Management Using Hierarchical Policies and Knowledge Ontology
 ReinForest: Multi-Domain Dialogue Management Using Hierarchical Policies and Knowledge Ontology Tiancheng Zhao CMU-LTI-16-006 Language Technologies Institute School of Computer Science Carnegie Mellon
ReinForest: Multi-Domain Dialogue Management Using Hierarchical Policies and Knowledge Ontology Tiancheng Zhao CMU-LTI-16-006 Language Technologies Institute School of Computer Science Carnegie Mellon
AUTOMATED TROUBLESHOOTING OF MOBILE NETWORKS USING BAYESIAN NETWORKS
 AUTOMATED TROUBLESHOOTING OF MOBILE NETWORKS USING BAYESIAN NETWORKS R.Barco 1, R.Guerrero 2, G.Hylander 2, L.Nielsen 3, M.Partanen 2, S.Patel 4 1 Dpt. Ingeniería de Comunicaciones. Universidad de Málaga.
AUTOMATED TROUBLESHOOTING OF MOBILE NETWORKS USING BAYESIAN NETWORKS R.Barco 1, R.Guerrero 2, G.Hylander 2, L.Nielsen 3, M.Partanen 2, S.Patel 4 1 Dpt. Ingeniería de Comunicaciones. Universidad de Málaga.
ACTL5103 Stochastic Modelling For Actuaries. Course Outline Semester 2, 2014
 UNSW Australia Business School School of Risk and Actuarial Studies ACTL5103 Stochastic Modelling For Actuaries Course Outline Semester 2, 2014 Part A: Course-Specific Information Please consult Part B
UNSW Australia Business School School of Risk and Actuarial Studies ACTL5103 Stochastic Modelling For Actuaries Course Outline Semester 2, 2014 Part A: Course-Specific Information Please consult Part B
Automatic Discretization of Actions and States in Monte-Carlo Tree Search
 Automatic Discretization of Actions and States in Monte-Carlo Tree Search Guy Van den Broeck 1 and Kurt Driessens 2 1 Katholieke Universiteit Leuven, Department of Computer Science, Leuven, Belgium guy.vandenbroeck@cs.kuleuven.be
Automatic Discretization of Actions and States in Monte-Carlo Tree Search Guy Van den Broeck 1 and Kurt Driessens 2 1 Katholieke Universiteit Leuven, Department of Computer Science, Leuven, Belgium guy.vandenbroeck@cs.kuleuven.be
Transferring End-to-End Visuomotor Control from Simulation to Real World for a Multi-Stage Task
 Transferring End-to-End Visuomotor Control from Simulation to Real World for a Multi-Stage Task Stephen James Dyson Robotics Lab Imperial College London slj12@ic.ac.uk Andrew J. Davison Dyson Robotics
Transferring End-to-End Visuomotor Control from Simulation to Real World for a Multi-Stage Task Stephen James Dyson Robotics Lab Imperial College London slj12@ic.ac.uk Andrew J. Davison Dyson Robotics
BMBF Project ROBUKOM: Robust Communication Networks
 BMBF Project ROBUKOM: Robust Communication Networks Arie M.C.A. Koster Christoph Helmberg Andreas Bley Martin Grötschel Thomas Bauschert supported by BMBF grant 03MS616A: ROBUKOM Robust Communication Networks,
BMBF Project ROBUKOM: Robust Communication Networks Arie M.C.A. Koster Christoph Helmberg Andreas Bley Martin Grötschel Thomas Bauschert supported by BMBF grant 03MS616A: ROBUKOM Robust Communication Networks,
Calibration of Confidence Measures in Speech Recognition
 Submitted to IEEE Trans on Audio, Speech, and Language, July 2010 1 Calibration of Confidence Measures in Speech Recognition Dong Yu, Senior Member, IEEE, Jinyu Li, Member, IEEE, Li Deng, Fellow, IEEE
Submitted to IEEE Trans on Audio, Speech, and Language, July 2010 1 Calibration of Confidence Measures in Speech Recognition Dong Yu, Senior Member, IEEE, Jinyu Li, Member, IEEE, Li Deng, Fellow, IEEE
Doctor of Public Health (DrPH) Degree Program Curriculum for the 60 Hour DrPH Behavioral Science and Health Education
 Degree Program Curriculum for the 60 Hour DrPH Behavioral Science and Health Education") College of Pharmacy and Pharmaceutical Sciences Institute of Public Health Doctor of Public Health (DrPH) Degree Program Curriculum for the 60 Hour DrPH Behavioral Science and Health Education Behavioral
College of Pharmacy and Pharmaceutical Sciences Institute of Public Health Doctor of Public Health (DrPH) Degree Program Curriculum for the 60 Hour DrPH Behavioral Science and Health Education Behavioral
Why Did My Detector Do That?!
 Why Did My Detector Do That?! Predicting Keystroke-Dynamics Error Rates Kevin Killourhy and Roy Maxion Dependable Systems Laboratory Computer Science Department Carnegie Mellon University 5000 Forbes Ave,
Why Did My Detector Do That?! Predicting Keystroke-Dynamics Error Rates Kevin Killourhy and Roy Maxion Dependable Systems Laboratory Computer Science Department Carnegie Mellon University 5000 Forbes Ave,
Time series prediction
 Chapter 13 Time series prediction Amaury Lendasse, Timo Honkela, Federico Pouzols, Antti Sorjamaa, Yoan Miche, Qi Yu, Eric Severin, Mark van Heeswijk, Erkki Oja, Francesco Corona, Elia Liitiäinen, Zhanxing
Chapter 13 Time series prediction Amaury Lendasse, Timo Honkela, Federico Pouzols, Antti Sorjamaa, Yoan Miche, Qi Yu, Eric Severin, Mark van Heeswijk, Erkki Oja, Francesco Corona, Elia Liitiäinen, Zhanxing
Purdue Data Summit Communication of Big Data Analytics. New SAT Predictive Validity Case Study
 Purdue Data Summit 2017 Communication of Big Data Analytics New SAT Predictive Validity Case Study Paul M. Johnson, Ed.D. Associate Vice President for Enrollment Management, Research & Enrollment Information
Purdue Data Summit 2017 Communication of Big Data Analytics New SAT Predictive Validity Case Study Paul M. Johnson, Ed.D. Associate Vice President for Enrollment Management, Research & Enrollment Information
Improving Fairness in Memory Scheduling
 Improving Fairness in Memory Scheduling Using a Team of Learning Automata Aditya Kajwe and Madhu Mutyam Department of Computer Science & Engineering, Indian Institute of Tehcnology - Madras June 14, 2014
Improving Fairness in Memory Scheduling Using a Team of Learning Automata Aditya Kajwe and Madhu Mutyam Department of Computer Science & Engineering, Indian Institute of Tehcnology - Madras June 14, 2014
Attributed Social Network Embedding
 JOURNAL OF LATEX CLASS FILES, VOL. 14, NO. 8, MAY 2017 1 Attributed Social Network Embedding arxiv:1705.04969v1 [cs.si] 14 May 2017 Lizi Liao, Xiangnan He, Hanwang Zhang, and Tat-Seng Chua Abstract Embedding
JOURNAL OF LATEX CLASS FILES, VOL. 14, NO. 8, MAY 2017 1 Attributed Social Network Embedding arxiv:1705.04969v1 [cs.si] 14 May 2017 Lizi Liao, Xiangnan He, Hanwang Zhang, and Tat-Seng Chua Abstract Embedding
An Introduction to Simulation Optimization
 An Introduction to Simulation Optimization Nanjing Jian Shane G. Henderson Introductory Tutorials Winter Simulation Conference December 7, 2015 Thanks: NSF CMMI1200315 1 Contents 1. Introduction 2. Common
An Introduction to Simulation Optimization Nanjing Jian Shane G. Henderson Introductory Tutorials Winter Simulation Conference December 7, 2015 Thanks: NSF CMMI1200315 1 Contents 1. Introduction 2. Common
ENME 605 Advanced Control Systems, Fall 2015 Department of Mechanical Engineering
 ENME 605 Advanced Control Systems, Fall 2015 Department of Mechanical Engineering Lecture Details Instructor Course Objectives Tuesday and Thursday, 4:00 pm to 5:15 pm Information Technology and Engineering
ENME 605 Advanced Control Systems, Fall 2015 Department of Mechanical Engineering Lecture Details Instructor Course Objectives Tuesday and Thursday, 4:00 pm to 5:15 pm Information Technology and Engineering
12- A whirlwind tour of statistics
 CyLab HT 05-436 / 05-836 / 08-534 / 08-734 / 19-534 / 19-734 Usable Privacy and Security TP :// C DU February 22, 2016 y & Secu rivac rity P le ratory bo La Lujo Bauer, Nicolas Christin, and Abby Marsh
CyLab HT 05-436 / 05-836 / 08-534 / 08-734 / 19-534 / 19-734 Usable Privacy and Security TP :// C DU February 22, 2016 y & Secu rivac rity P le ratory bo La Lujo Bauer, Nicolas Christin, and Abby Marsh