Uninformed Search (Ch )
|
|
|
- Cathleen Carpenter
- 6 years ago
- Views:
Transcription
1 1 Uninformed Search (Ch )
2 2 Announcements Will make homework this weekend (~4 days) due next weekend (~13 days)
3 3 What did we do last time? Take away messages: Lecture 1: Class schedule (ended early) Lecture 2: AI in general (and where we fit) Lecture 3(now): Clarify (hopefully) this class and where it fits into broader AI Also, start discussing algorithms!
4 4 Environment classification Pick a game/hobby/sport/pastime/whatever and describe both the PEAS and whether the environment/agent is: 1. Fully vs. partially observable (how much see?) 2. Single vs. multi-agent (need to consider others?) 3. Deterministic vs. stochastic (know outcome of action?) 4. Episodic vs. sequential (independent vs. dependent) 5. Static vs. dynamic (have time to think?) 6. Discrete vs. continuous (how finely measure?) 7. Known vs. unknown (know the rules?)
5 5 Agent models Can also classify agents into four categories: 1. Simple reflex 2. Model-based reflex 3. Goal based 4. Utility based Top is typically simpler and harder to adapt to similar problems, while bottom is more general representations
6 6 Agent models A simple reflex agents acts only on the most recent part of the percept and not the whole history Our vacuum agent is of this type, as it only looks at the current state and not any previous These can be generalized as: if state = then do action (often can fail or loop infinitely)
7 7 Agent models A model-based reflex agent needs to have a representation of the environment in memory (called internal state) This internal state is updated with each observation and then dictates actions The degree that the environment is modeled is up to the agent/designer (a single bit vs. a full representation)
8 9 Agent models This internal state should be from the agent's perspective, not a global perspective (as same global state might have different actions) Consider these pictures of a maze: Which way to go? Pic 1 Pic 2
9 10 Agent models The global perspective is the same, but the agents could have different goals (stars) Pic 1 Pic 2 Goals are not global information
10 11 Agent models For the vacuum agent if the dirt does not reappear, then we do not want to keep moving The simple reflex agent program cannot do this, so we would have to have some memory (or model) This could be as simple as a flag indicating whether or not we have checked the other state
11 12 Agent models The goal based agent is more general than the model-based agent In addition to the environment model, it has a goal indicating a desired configuration Abstracting to a goals generalizes your method to different (similar) problems (for example, a model-based agent could solve one maze, but a goal can solve any maze)
12 13 Agent models A utility based agent maps the sequence of states (or actions) to a real value Goals can describe general terms as success or failure, but there is no degree of success In the maze example, a goal based agent can find the exit. But a utility based agent can find the shortest path to the exit

13 14 Agent models What is the agent model of our vacuum? if [Dirty], return [Suck] if at [state A], return [move right] if at [state B], return [move left]

14 15 Agent models What is the agent model of particles? Think of a way to improve the agent and describe what model it is now
15 16 Agent learning For many complicated problems (facial recognition, high degree of freedom robot movement), it would be too hard to explicitly tell the agent what to do Instead, we build a framework to learn the problem and let the agent decide what to do This is less work and allows the agent to adapt if the environment changes
16 17 Agent learning There are four main components to learning: 1. Critic = evaluates how well the agent is doing and whether it needs to change actions (similar to performance measure) 2. Learning element = incorporate new information to improve agent 3. Performance element = selects action agent will do (exploit known best solution) 4. Problem generator = find new solutions (explore problem space for better solution)
17 18 State structure States can be generalized into three categories: 1. Atomic (Ch. 3-5, 15, 17) 2. Factored (Ch. 6-7, 10-11, 13-16, 18, 20-21) 3. Structured (Ch. 8-9, 12, 14, 19, 22-23) (Top are simpler, bottom are more general) Occam's razor = if two results are identical, use the simpler approach
18 19 State structure An atomic state has no sub-parts and acts as a simple unique identifier An example is an elevator: Elevator = agent (actions = up/down) Floor = state In this example, when someone requests the elevator on floor 7, the only information the agent has is what floor it currently is on
19 20 State structure Another example of an atomic representation is simple path finding: If we start (here) in Amundson B75, how would you get to Keller's CS office? Am. B75 -> Hallway1 -> Tunnel -> Hallway2 -> Elevator -> Hallway3 -> CS office The words above hold no special meaning other than differentiating from each other
20 21 State structure A factored state has a fixed number of variables/attributes associated with it Our simple vacuum example is factored, as each state has an id (A or B) along with a dirty property In particles, each state has a set of red balls with locations along with the blue ball location
21 22 State structure Structured states simply describe objects and their relationship to others Suppose we have 3 blocks: A, B and C We could describe: A on top of B, C next to B A factored representation would have to enumerate all possible configurations of A, B and C to be as representative
22 23 State structure We will start using structured approaches when we deal with logic: Summer implies Warm Warm implies T-Shirt The current state might be:!summer ( Summer) but the states have intrinsic relations between each other (not just actions)
23 31 This course Typically in this course we will look at: 1. Fully observable 2. Single agent (little multi-agent) 3. Deterministic (little stochastic at end) 4. Sequential 5. Static 6. Discrete 7. Known (little unknown at end, i.e. learning) With either goal or utility models
24 32 Search Goal based agents need to search to find a path from their start to the goal (a path is a sequence of actions, not states) For now we consider problem solving agents who search on atomically structured spaces Today we will focus on uninformed searches, which only know cost between states but no other extra information
25 33 Search In the vacuum example, the states and actions are obvious and simple In more complex environments, we have a choice of how to abstract the problem into simple (yet expressive) states and actions The solution to the abstracted problem should be able to serve as the basis of a more detailed problem (i.e. fit the detailed solution inside)

26 34 Search Example: Google maps gives direction by telling you a sequence of roads and does not dictate speed, stop signs/lights, road lane
27 35 Search In deterministic environments the search solution is a single sequence (list of actions) Stochastic environments need multiple sequences to account for all possible outcomes of actions It can be costly to keep track of all of these and might be better to keep the most likely and search again if you are off the sequences
28 36 Search There are 5 parts to search: 1. Initial state 2. Actions possible at each state 3. Transition model (result of each action) 4. Goal test (are we there yet?) 5. Path costs/weights (not stored in states) (related to performance measure) In search we normally fully see the problem and the initial state and compute all actions
29 37 Small examples Here is our vacuum world again: 1. initial 4. goals 2. For all states, we have actions: L, R or S 3. Transition model = black arrows 5. Path cost =??? (from performance measure)
30 38 Small examples 8-Puzzle 1. (semi) Random 2. All states: U,D,L,R 4. As shown here 5. Path cost = 1 (move count) 3. Transition model (example): Result(,D) = (see:

31 39 Small examples 8-Puzzle is NP complete so to find the best solution, we must brute force 3x3 board = = 181,440 states 4x4 board = 1.3 trillion states Solution time: milliseconds 5x5 board = 1025 states Solution time: hours

32 40 Small examples 8-Queens: how to fit 8 queens on a 8x8 board so no 2 queens can capture each other Two ways to model this: Incremental = each action is to add a queen to the board (1.8 x 1014 states) Complete state formulation = all 8 queens start on board, action = move a queen (2057 states)

33 41 Real world examples Directions/traveling (land or air) Model choices: only have interstates? Add smaller roads, with increased cost? (pointless if they are never taken)


34 42 Real world examples Touring problem: visit each place at least once, end up at starting location Goal: Minimize distance traveled

35 43 Real world examples Traveling salesperson problem (TSP): Visit each location exactly once and return to start Goal: Minimize distance traveled
36 44 Search algorithm To search, we will build a tree with the root as the initial state Any problems with this?

37 45 Search algorithm
38 46 Search algorithm 8-queens can actually be generalized to the question: Can you fit n queens on a z by z board? Except for a couple of small size boards, you can fit z queens on a z by z board This can be done fairly easily with recursion (See: nqueens.cpp)
39 47 Search algorithm We can remove visiting states multiple times by doing this: But this is still not necessarily all that great...
40 48 Search algorithm Next we will introduce and compare some tree search algorithms These all assume nodes have 4 properties: 1. The current state 2. Their parent state (and action for transition) 3. Children from this node (result of actions) 4. Cost to reach this node (from root)
41 49 Search algorithm When we find a goal state, we can back track via the parent to get the sequence To keep track of the unexplored nodes, we will use a queue (of various types) The explored set is probably best as a hash table for quick lookup (have to ensure similar states reached via alternative paths are the same in the has, can be done by sorting)
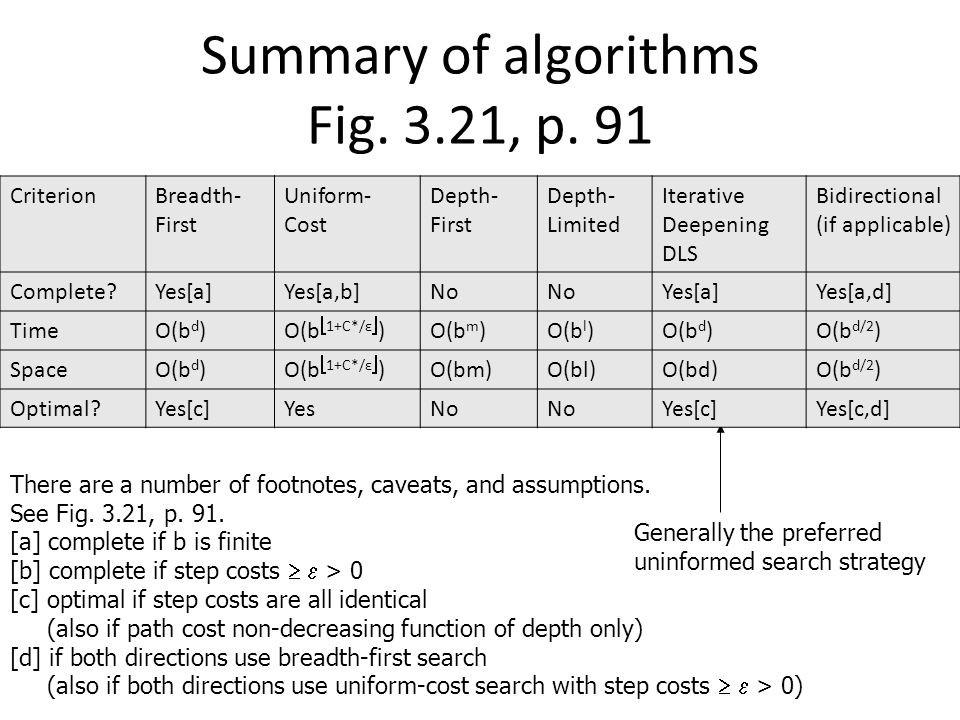
42 50 Search algorithm The search algorithms metrics/criteria: 1. Completeness (does it terminate with a valid solution) 2. Optimality (is the answer the best solution) 3. Time (in big-o notation) 4. Space (big-o) b = maximum branching factor d = minimum depth of a goal m = maximum length of any path
43 51 Uninformed search Today, we will focus on uninformed search, which only have the node information (4 parts) (the costs are given and cannot be computed) Next time we will continue with informed searches that assume they have access to additional structures of the problem (i.e. if costs were distances between cities, you could also compute the distance as the bird flies )
44 52 Breadth first search Breadth first search checks all states which are reached with the fewest actions first (i.e. will check all states that can be reached by a single action from the start, next all states that can be reached by two actions, then three...)
45 53 Breadth first search (see: (see:
46 54 Breadth first search BFS can be implemented by using a simple FIFO (first in, first out) queue to track the fringe/frontier/unexplored nodes Metrics for BFS: Complete (i.e. guaranteed to find solution if exists) Non-optimal (unless uniform path cost) Time complexity = O(bd) Space complexity = O(bd)

47 55 Breadth first search Exponential problems are not very fun, as seen in this picture:
48 56 Uniform-cost search Uniform-cost search also does a queue, but uses a priority queue based on the cost (the lowest cost node is chosen to be explored)
49 57 Uniform-cost search The only modification is when exploring a node we cannot disregard it if it has already been explored by another node We might have found a shorter path and thus need to update the cost on that node We also do not terminate when we find a goal, but instead when the goal has the lowest cost in the queue.
50 58 Uniform-cost search UCS is.. 1. Complete (if costs strictly greater than 0) 2. Optimal However... 3&4. Time complexity = space complexity = O(b1+C*/min(path cost)), where C* cost of optimal solution (much worse than BFS)
51 59 Depth first search DFS is same as BFS except with a FILO (or LIFO) instead of a FIFO queue
 d 3. Time complexity = O(b ) 4.")
52 60 Depth first search Metrics: 1. Might not terminate (not correct) (e.g. in vacuum world, if first expand is action L) 2. Non-optimal (just... no) d 3. Time complexity = O(b ) 4. Space complexity = O(b*d) Only way this is better than BFS is the space complexity...
53 61 Depth limited search DFS by itself is not great, but it has two (very) useful modifications Depth limited search runs normal DFS, but if it is at a specified depth limit, you cannot have children (i.e. take another action) Typically with a little more knowledge, you can create a reasonable limit and makes the algorithm correct
54 62 Depth limited search However, if you pick the depth limit before d, you will not find a solution (not correct, but will terminate)
55 63 Iterative deepening DFS Probably the most useful uninformed search is iterative deepening DFS This search performs depth limited search with maximum depth 1, then maximum depth 2, then 3... until it finds a solution
56 64 Iterative deepening DFS
57 65 Iterative deepening DFS The first few states do get re-checked multiple times in IDS, however it is not too many When you find the solution at depth d, depth 1 is expanded d times (at most b of them) The second depth are expanded d-1 times (at most b2 of them) Thus
58 66 Iterative deepening DFS Metrics: 1. Complete 2. Non-optimal (unless uniform cost) d 3. O(b ) 4. O(bd) Thus IDS is better in every way than BFS (asymptotically) Best uninformed we will talk about
59 67 Bidirectional search Bidirectional search starts from both the goal and start (using BFS) until the trees meet This is better as 2*(b ) < b (the space is much worse than IDS, so only applicable to small problems) d/2 d
60 68 Uninformed search
Intelligent Agents. Chapter 2. Chapter 2 1
 Intelligent Agents Chapter 2 Chapter 2 1 Outline Agents and environments Rationality PEAS (Performance measure, Environment, Actuators, Sensors) Environment types The structure of agents Chapter 2 2 Agents
Intelligent Agents Chapter 2 Chapter 2 1 Outline Agents and environments Rationality PEAS (Performance measure, Environment, Actuators, Sensors) Environment types The structure of agents Chapter 2 2 Agents
Chapter 2. Intelligent Agents. Outline. Agents and environments. Rationality. PEAS (Performance measure, Environment, Actuators, Sensors)
") Intelligent Agents Chapter 2 1 Outline Agents and environments Rationality PEAS (Performance measure, Environment, Actuators, Sensors) Agent types 2 Agents and environments sensors environment percepts
Intelligent Agents Chapter 2 1 Outline Agents and environments Rationality PEAS (Performance measure, Environment, Actuators, Sensors) Agent types 2 Agents and environments sensors environment percepts
Agents and environments. Intelligent Agents. Reminders. Vacuum-cleaner world. Outline. A vacuum-cleaner agent. Chapter 2 Actuators
 s and environments Percepts Intelligent s? Chapter 2 Actions s include humans, robots, softbots, thermostats, etc. The agent function maps from percept histories to actions: f : P A The agent program runs
s and environments Percepts Intelligent s? Chapter 2 Actions s include humans, robots, softbots, thermostats, etc. The agent function maps from percept histories to actions: f : P A The agent program runs
Multimedia Application Effective Support of Education
 Multimedia Application Effective Support of Education Eva Milková Faculty of Science, University od Hradec Králové, Hradec Králové, Czech Republic eva.mikova@uhk.cz Abstract Multimedia applications have
Multimedia Application Effective Support of Education Eva Milková Faculty of Science, University od Hradec Králové, Hradec Králové, Czech Republic eva.mikova@uhk.cz Abstract Multimedia applications have
Exploration. CS : Deep Reinforcement Learning Sergey Levine
 Exploration CS 294-112: Deep Reinforcement Learning Sergey Levine Class Notes 1. Homework 4 due on Wednesday 2. Project proposal feedback sent Today s Lecture 1. What is exploration? Why is it a problem?
Exploration CS 294-112: Deep Reinforcement Learning Sergey Levine Class Notes 1. Homework 4 due on Wednesday 2. Project proposal feedback sent Today s Lecture 1. What is exploration? Why is it a problem?
Lecture 10: Reinforcement Learning
 Lecture 1: Reinforcement Learning Cognitive Systems II - Machine Learning SS 25 Part III: Learning Programs and Strategies Q Learning, Dynamic Programming Lecture 1: Reinforcement Learning p. Motivation
Lecture 1: Reinforcement Learning Cognitive Systems II - Machine Learning SS 25 Part III: Learning Programs and Strategies Q Learning, Dynamic Programming Lecture 1: Reinforcement Learning p. Motivation
Lecture 1: Machine Learning Basics
 1/69 Lecture 1: Machine Learning Basics Ali Harakeh University of Waterloo WAVE Lab ali.harakeh@uwaterloo.ca May 1, 2017 2/69 Overview 1 Learning Algorithms 2 Capacity, Overfitting, and Underfitting 3
1/69 Lecture 1: Machine Learning Basics Ali Harakeh University of Waterloo WAVE Lab ali.harakeh@uwaterloo.ca May 1, 2017 2/69 Overview 1 Learning Algorithms 2 Capacity, Overfitting, and Underfitting 3
Seminar - Organic Computing
 Seminar - Organic Computing Self-Organisation of OC-Systems Markus Franke 25.01.2006 Typeset by FoilTEX Timetable 1. Overview 2. Characteristics of SO-Systems 3. Concern with Nature 4. Design-Concepts
Seminar - Organic Computing Self-Organisation of OC-Systems Markus Franke 25.01.2006 Typeset by FoilTEX Timetable 1. Overview 2. Characteristics of SO-Systems 3. Concern with Nature 4. Design-Concepts
Module 12. Machine Learning. Version 2 CSE IIT, Kharagpur
 Module 12 Machine Learning 12.1 Instructional Objective The students should understand the concept of learning systems Students should learn about different aspects of a learning system Students should
Module 12 Machine Learning 12.1 Instructional Objective The students should understand the concept of learning systems Students should learn about different aspects of a learning system Students should
Rover Races Grades: 3-5 Prep Time: ~45 Minutes Lesson Time: ~105 minutes
 Rover Races Grades: 3-5 Prep Time: ~45 Minutes Lesson Time: ~105 minutes WHAT STUDENTS DO: Establishing Communication Procedures Following Curiosity on Mars often means roving to places with interesting
Rover Races Grades: 3-5 Prep Time: ~45 Minutes Lesson Time: ~105 minutes WHAT STUDENTS DO: Establishing Communication Procedures Following Curiosity on Mars often means roving to places with interesting
Visual CP Representation of Knowledge
 Visual CP Representation of Knowledge Heather D. Pfeiffer and Roger T. Hartley Department of Computer Science New Mexico State University Las Cruces, NM 88003-8001, USA email: hdp@cs.nmsu.edu and rth@cs.nmsu.edu
Visual CP Representation of Knowledge Heather D. Pfeiffer and Roger T. Hartley Department of Computer Science New Mexico State University Las Cruces, NM 88003-8001, USA email: hdp@cs.nmsu.edu and rth@cs.nmsu.edu
CS Machine Learning
 CS 478 - Machine Learning Projects Data Representation Basic testing and evaluation schemes CS 478 Data and Testing 1 Programming Issues l Program in any platform you want l Realize that you will be doing
CS 478 - Machine Learning Projects Data Representation Basic testing and evaluation schemes CS 478 Data and Testing 1 Programming Issues l Program in any platform you want l Realize that you will be doing
Evolution of Collective Commitment during Teamwork
 Fundamenta Informaticae 56 (2003) 329 371 329 IOS Press Evolution of Collective Commitment during Teamwork Barbara Dunin-Kȩplicz Institute of Informatics, Warsaw University Banacha 2, 02-097 Warsaw, Poland
Fundamenta Informaticae 56 (2003) 329 371 329 IOS Press Evolution of Collective Commitment during Teamwork Barbara Dunin-Kȩplicz Institute of Informatics, Warsaw University Banacha 2, 02-097 Warsaw, Poland
(Sub)Gradient Descent
Gradient Descent") (Sub)Gradient Descent CMSC 422 MARINE CARPUAT marine@cs.umd.edu Figures credit: Piyush Rai Logistics Midterm is on Thursday 3/24 during class time closed book/internet/etc, one page of notes. will include
(Sub)Gradient Descent CMSC 422 MARINE CARPUAT marine@cs.umd.edu Figures credit: Piyush Rai Logistics Midterm is on Thursday 3/24 during class time closed book/internet/etc, one page of notes. will include
Ricochet Robots - A Case Study for Human Complex Problem Solving
 Ricochet Robots - A Case Study for Human Complex Problem Solving Nicolas Butko, Katharina A. Lehmann, Veronica Ramenzoni September 15, 005 1 Introduction At the beginning of the Cognitive Revolution, stimulated
Ricochet Robots - A Case Study for Human Complex Problem Solving Nicolas Butko, Katharina A. Lehmann, Veronica Ramenzoni September 15, 005 1 Introduction At the beginning of the Cognitive Revolution, stimulated
Reinforcement Learning by Comparing Immediate Reward
 Reinforcement Learning by Comparing Immediate Reward Punit Pandey DeepshikhaPandey Dr. Shishir Kumar Abstract This paper introduces an approach to Reinforcement Learning Algorithm by comparing their immediate
Reinforcement Learning by Comparing Immediate Reward Punit Pandey DeepshikhaPandey Dr. Shishir Kumar Abstract This paper introduces an approach to Reinforcement Learning Algorithm by comparing their immediate
University of Groningen. Systemen, planning, netwerken Bosman, Aart
 University of Groningen Systemen, planning, netwerken Bosman, Aart IMPORTANT NOTE: You are advised to consult the publisher's version (publisher's PDF) if you wish to cite from it. Please check the document
University of Groningen Systemen, planning, netwerken Bosman, Aart IMPORTANT NOTE: You are advised to consult the publisher's version (publisher's PDF) if you wish to cite from it. Please check the document
Software Maintenance
 1 What is Software Maintenance? Software Maintenance is a very broad activity that includes error corrections, enhancements of capabilities, deletion of obsolete capabilities, and optimization. 2 Categories
1 What is Software Maintenance? Software Maintenance is a very broad activity that includes error corrections, enhancements of capabilities, deletion of obsolete capabilities, and optimization. 2 Categories
Algebra 2- Semester 2 Review
 Name Block Date Algebra 2- Semester 2 Review Non-Calculator 5.4 1. Consider the function f x 1 x 2. a) Describe the transformation of the graph of y 1 x. b) Identify the asymptotes. c) What is the domain
Name Block Date Algebra 2- Semester 2 Review Non-Calculator 5.4 1. Consider the function f x 1 x 2. a) Describe the transformation of the graph of y 1 x. b) Identify the asymptotes. c) What is the domain
ISFA2008U_120 A SCHEDULING REINFORCEMENT LEARNING ALGORITHM
 Proceedings of 28 ISFA 28 International Symposium on Flexible Automation Atlanta, GA, USA June 23-26, 28 ISFA28U_12 A SCHEDULING REINFORCEMENT LEARNING ALGORITHM Amit Gil, Helman Stern, Yael Edan, and
Proceedings of 28 ISFA 28 International Symposium on Flexible Automation Atlanta, GA, USA June 23-26, 28 ISFA28U_12 A SCHEDULING REINFORCEMENT LEARNING ALGORITHM Amit Gil, Helman Stern, Yael Edan, and
A Version Space Approach to Learning Context-free Grammars
 Machine Learning 2: 39~74, 1987 1987 Kluwer Academic Publishers, Boston - Manufactured in The Netherlands A Version Space Approach to Learning Context-free Grammars KURT VANLEHN (VANLEHN@A.PSY.CMU.EDU)
Machine Learning 2: 39~74, 1987 1987 Kluwer Academic Publishers, Boston - Manufactured in The Netherlands A Version Space Approach to Learning Context-free Grammars KURT VANLEHN (VANLEHN@A.PSY.CMU.EDU)
Machine Learning and Data Mining. Ensembles of Learners. Prof. Alexander Ihler
 Machine Learning and Data Mining Ensembles of Learners Prof. Alexander Ihler Ensemble methods Why learn one classifier when you can learn many? Ensemble: combine many predictors (Weighted) combina
Machine Learning and Data Mining Ensembles of Learners Prof. Alexander Ihler Ensemble methods Why learn one classifier when you can learn many? Ensemble: combine many predictors (Weighted) combina
Axiom 2013 Team Description Paper
 Axiom 2013 Team Description Paper Mohammad Ghazanfari, S Omid Shirkhorshidi, Farbod Samsamipour, Hossein Rahmatizadeh Zagheli, Mohammad Mahdavi, Payam Mohajeri, S Abbas Alamolhoda Robotics Scientific Association
Axiom 2013 Team Description Paper Mohammad Ghazanfari, S Omid Shirkhorshidi, Farbod Samsamipour, Hossein Rahmatizadeh Zagheli, Mohammad Mahdavi, Payam Mohajeri, S Abbas Alamolhoda Robotics Scientific Association
Introduction to Ensemble Learning Featuring Successes in the Netflix Prize Competition
 Introduction to Ensemble Learning Featuring Successes in the Netflix Prize Competition Todd Holloway Two Lecture Series for B551 November 20 & 27, 2007 Indiana University Outline Introduction Bias and
Introduction to Ensemble Learning Featuring Successes in the Netflix Prize Competition Todd Holloway Two Lecture Series for B551 November 20 & 27, 2007 Indiana University Outline Introduction Bias and
Introduction to Simulation
 Introduction to Simulation Spring 2010 Dr. Louis Luangkesorn University of Pittsburgh January 19, 2010 Dr. Louis Luangkesorn ( University of Pittsburgh ) Introduction to Simulation January 19, 2010 1 /
Introduction to Simulation Spring 2010 Dr. Louis Luangkesorn University of Pittsburgh January 19, 2010 Dr. Louis Luangkesorn ( University of Pittsburgh ) Introduction to Simulation January 19, 2010 1 /
MYCIN. The MYCIN Task
 MYCIN Developed at Stanford University in 1972 Regarded as the first true expert system Assists physicians in the treatment of blood infections Many revisions and extensions over the years The MYCIN Task
MYCIN Developed at Stanford University in 1972 Regarded as the first true expert system Assists physicians in the treatment of blood infections Many revisions and extensions over the years The MYCIN Task
Lecture 1: Basic Concepts of Machine Learning
 Lecture 1: Basic Concepts of Machine Learning Cognitive Systems - Machine Learning Ute Schmid (lecture) Johannes Rabold (practice) Based on slides prepared March 2005 by Maximilian Röglinger, updated 2010
Lecture 1: Basic Concepts of Machine Learning Cognitive Systems - Machine Learning Ute Schmid (lecture) Johannes Rabold (practice) Based on slides prepared March 2005 by Maximilian Röglinger, updated 2010
Mathematics Success Grade 7
 T894 Mathematics Success Grade 7 [OBJECTIVE] The student will find probabilities of compound events using organized lists, tables, tree diagrams, and simulations. [PREREQUISITE SKILLS] Simple probability,
T894 Mathematics Success Grade 7 [OBJECTIVE] The student will find probabilities of compound events using organized lists, tables, tree diagrams, and simulations. [PREREQUISITE SKILLS] Simple probability,
Course Content Concepts
 CS 1371 SYLLABUS, Fall, 2017 Revised 8/6/17 Computing for Engineers Course Content Concepts The students will be expected to be familiar with the following concepts, either by writing code to solve problems,
CS 1371 SYLLABUS, Fall, 2017 Revised 8/6/17 Computing for Engineers Course Content Concepts The students will be expected to be familiar with the following concepts, either by writing code to solve problems,
LEGO MINDSTORMS Education EV3 Coding Activities
 LEGO MINDSTORMS Education EV3 Coding Activities s t e e h s k r o W t n e d Stu LEGOeducation.com/MINDSTORMS Contents ACTIVITY 1 Performing a Three Point Turn 3-6 ACTIVITY 2 Written Instructions for a
LEGO MINDSTORMS Education EV3 Coding Activities s t e e h s k r o W t n e d Stu LEGOeducation.com/MINDSTORMS Contents ACTIVITY 1 Performing a Three Point Turn 3-6 ACTIVITY 2 Written Instructions for a
Writing Research Articles
 Marek J. Druzdzel with minor additions from Peter Brusilovsky University of Pittsburgh School of Information Sciences and Intelligent Systems Program marek@sis.pitt.edu http://www.pitt.edu/~druzdzel Overview
Marek J. Druzdzel with minor additions from Peter Brusilovsky University of Pittsburgh School of Information Sciences and Intelligent Systems Program marek@sis.pitt.edu http://www.pitt.edu/~druzdzel Overview
Self Study Report Computer Science
 Computer Science undergraduate students have access to undergraduate teaching, and general computing facilities in three buildings. Two large classrooms are housed in the Davis Centre, which hold about
Computer Science undergraduate students have access to undergraduate teaching, and general computing facilities in three buildings. Two large classrooms are housed in the Davis Centre, which hold about
Implementing a tool to Support KAOS-Beta Process Model Using EPF
 Implementing a tool to Support KAOS-Beta Process Model Using EPF Malihe Tabatabaie Malihe.Tabatabaie@cs.york.ac.uk Department of Computer Science The University of York United Kingdom Eclipse Process Framework
Implementing a tool to Support KAOS-Beta Process Model Using EPF Malihe Tabatabaie Malihe.Tabatabaie@cs.york.ac.uk Department of Computer Science The University of York United Kingdom Eclipse Process Framework
EVOLVING POLICIES TO SOLVE THE RUBIK S CUBE: EXPERIMENTS WITH IDEAL AND APPROXIMATE PERFORMANCE FUNCTIONS
 EVOLVING POLICIES TO SOLVE THE RUBIK S CUBE: EXPERIMENTS WITH IDEAL AND APPROXIMATE PERFORMANCE FUNCTIONS by Robert Smith Submitted in partial fulfillment of the requirements for the degree of Master of
EVOLVING POLICIES TO SOLVE THE RUBIK S CUBE: EXPERIMENTS WITH IDEAL AND APPROXIMATE PERFORMANCE FUNCTIONS by Robert Smith Submitted in partial fulfillment of the requirements for the degree of Master of
Challenges in Deep Reinforcement Learning. Sergey Levine UC Berkeley
 Challenges in Deep Reinforcement Learning Sergey Levine UC Berkeley Discuss some recent work in deep reinforcement learning Present a few major challenges Show some of our recent work toward tackling
Challenges in Deep Reinforcement Learning Sergey Levine UC Berkeley Discuss some recent work in deep reinforcement learning Present a few major challenges Show some of our recent work toward tackling
Navigating the PhD Options in CMS
 Navigating the PhD Options in CMS This document gives an overview of the typical student path through the four Ph.D. programs in the CMS department ACM, CDS, CS, and CMS. Note that it is not a replacement
Navigating the PhD Options in CMS This document gives an overview of the typical student path through the four Ph.D. programs in the CMS department ACM, CDS, CS, and CMS. Note that it is not a replacement
Discriminative Learning of Beam-Search Heuristics for Planning
 Discriminative Learning of Beam-Search Heuristics for Planning Yuehua Xu School of EECS Oregon State University Corvallis,OR 97331 xuyu@eecs.oregonstate.edu Alan Fern School of EECS Oregon State University
Discriminative Learning of Beam-Search Heuristics for Planning Yuehua Xu School of EECS Oregon State University Corvallis,OR 97331 xuyu@eecs.oregonstate.edu Alan Fern School of EECS Oregon State University
Generative models and adversarial training
 Day 4 Lecture 1 Generative models and adversarial training Kevin McGuinness kevin.mcguinness@dcu.ie Research Fellow Insight Centre for Data Analytics Dublin City University What is a generative model?
Day 4 Lecture 1 Generative models and adversarial training Kevin McGuinness kevin.mcguinness@dcu.ie Research Fellow Insight Centre for Data Analytics Dublin City University What is a generative model?
Machine Learning from Garden Path Sentences: The Application of Computational Linguistics
 Machine Learning from Garden Path Sentences: The Application of Computational Linguistics http://dx.doi.org/10.3991/ijet.v9i6.4109 J.L. Du 1, P.F. Yu 1 and M.L. Li 2 1 Guangdong University of Foreign Studies,
Machine Learning from Garden Path Sentences: The Application of Computational Linguistics http://dx.doi.org/10.3991/ijet.v9i6.4109 J.L. Du 1, P.F. Yu 1 and M.L. Li 2 1 Guangdong University of Foreign Studies,
Version Space. Term 2012/2013 LSI - FIB. Javier Béjar cbea (LSI - FIB) Version Space Term 2012/ / 18
 Version Space Term 2012/ / 18") Version Space Javier Béjar cbea LSI - FIB Term 2012/2013 Javier Béjar cbea (LSI - FIB) Version Space Term 2012/2013 1 / 18 Outline 1 Learning logical formulas 2 Version space Introduction Search strategy
Version Space Javier Béjar cbea LSI - FIB Term 2012/2013 Javier Béjar cbea (LSI - FIB) Version Space Term 2012/2013 1 / 18 Outline 1 Learning logical formulas 2 Version space Introduction Search strategy
Medical Complexity: A Pragmatic Theory
 http://eoimages.gsfc.nasa.gov/images/imagerecords/57000/57747/cloud_combined_2048.jpg Medical Complexity: A Pragmatic Theory Chris Feudtner, MD PhD MPH The Children s Hospital of Philadelphia Main Thesis
http://eoimages.gsfc.nasa.gov/images/imagerecords/57000/57747/cloud_combined_2048.jpg Medical Complexity: A Pragmatic Theory Chris Feudtner, MD PhD MPH The Children s Hospital of Philadelphia Main Thesis
Genevieve L. Hartman, Ph.D.
 Curriculum Development and the Teaching-Learning Process: The Development of Mathematical Thinking for all children Genevieve L. Hartman, Ph.D. Topics for today Part 1: Background and rationale Current
Curriculum Development and the Teaching-Learning Process: The Development of Mathematical Thinking for all children Genevieve L. Hartman, Ph.D. Topics for today Part 1: Background and rationale Current
Contents. Foreword... 5
 Contents Foreword... 5 Chapter 1: Addition Within 0-10 Introduction... 6 Two Groups and a Total... 10 Learn Symbols + and =... 13 Addition Practice... 15 Which is More?... 17 Missing Items... 19 Sums with
Contents Foreword... 5 Chapter 1: Addition Within 0-10 Introduction... 6 Two Groups and a Total... 10 Learn Symbols + and =... 13 Addition Practice... 15 Which is More?... 17 Missing Items... 19 Sums with
Shared Mental Models
 Shared Mental Models A Conceptual Analysis Catholijn M. Jonker 1, M. Birna van Riemsdijk 1, and Bas Vermeulen 2 1 EEMCS, Delft University of Technology, Delft, The Netherlands {m.b.vanriemsdijk,c.m.jonker}@tudelft.nl
Shared Mental Models A Conceptual Analysis Catholijn M. Jonker 1, M. Birna van Riemsdijk 1, and Bas Vermeulen 2 1 EEMCS, Delft University of Technology, Delft, The Netherlands {m.b.vanriemsdijk,c.m.jonker}@tudelft.nl
Stacks Teacher notes. Activity description. Suitability. Time. AMP resources. Equipment. Key mathematical language. Key processes
 Stacks Teacher notes Activity description (Interactive not shown on this sheet.) Pupils start by exploring the patterns generated by moving counters between two stacks according to a fixed rule, doubling
Stacks Teacher notes Activity description (Interactive not shown on this sheet.) Pupils start by exploring the patterns generated by moving counters between two stacks according to a fixed rule, doubling
Speeding Up Reinforcement Learning with Behavior Transfer
 Speeding Up Reinforcement Learning with Behavior Transfer Matthew E. Taylor and Peter Stone Department of Computer Sciences The University of Texas at Austin Austin, Texas 78712-1188 {mtaylor, pstone}@cs.utexas.edu
Speeding Up Reinforcement Learning with Behavior Transfer Matthew E. Taylor and Peter Stone Department of Computer Sciences The University of Texas at Austin Austin, Texas 78712-1188 {mtaylor, pstone}@cs.utexas.edu
CS 101 Computer Science I Fall Instructor Muller. Syllabus
 CS 101 Computer Science I Fall 2013 Instructor Muller Syllabus Welcome to CS101. This course is an introduction to the art and science of computer programming and to some of the fundamental concepts of
CS 101 Computer Science I Fall 2013 Instructor Muller Syllabus Welcome to CS101. This course is an introduction to the art and science of computer programming and to some of the fundamental concepts of
Short vs. Extended Answer Questions in Computer Science Exams
 Short vs. Extended Answer Questions in Computer Science Exams Alejandro Salinger Opportunities and New Directions April 26 th, 2012 ajsalinger@uwaterloo.ca Computer Science Written Exams Many choices of
Short vs. Extended Answer Questions in Computer Science Exams Alejandro Salinger Opportunities and New Directions April 26 th, 2012 ajsalinger@uwaterloo.ca Computer Science Written Exams Many choices of
Designing a Computer to Play Nim: A Mini-Capstone Project in Digital Design I
 Session 1793 Designing a Computer to Play Nim: A Mini-Capstone Project in Digital Design I John Greco, Ph.D. Department of Electrical and Computer Engineering Lafayette College Easton, PA 18042 Abstract
Session 1793 Designing a Computer to Play Nim: A Mini-Capstone Project in Digital Design I John Greco, Ph.D. Department of Electrical and Computer Engineering Lafayette College Easton, PA 18042 Abstract
AP Calculus AB. Nevada Academic Standards that are assessable at the local level only.
 Calculus AB Priority Keys Aligned with Nevada Standards MA I MI L S MA represents a Major content area. Any concept labeled MA is something of central importance to the entire class/curriculum; it is a
Calculus AB Priority Keys Aligned with Nevada Standards MA I MI L S MA represents a Major content area. Any concept labeled MA is something of central importance to the entire class/curriculum; it is a
GACE Computer Science Assessment Test at a Glance
 GACE Computer Science Assessment Test at a Glance Updated May 2017 See the GACE Computer Science Assessment Study Companion for practice questions and preparation resources. Assessment Name Computer Science
GACE Computer Science Assessment Test at a Glance Updated May 2017 See the GACE Computer Science Assessment Study Companion for practice questions and preparation resources. Assessment Name Computer Science
Association Between Categorical Variables
 Student Outcomes Students use row relative frequencies or column relative frequencies to informally determine whether there is an association between two categorical variables. Lesson Notes In this lesson,
Student Outcomes Students use row relative frequencies or column relative frequencies to informally determine whether there is an association between two categorical variables. Lesson Notes In this lesson,
WSU Five-Year Program Review Self-Study Cover Page
 WSU Five-Year Program Review Self-Study Cover Page Department: Program: Computer Science Computer Science AS/BS Semester Submitted: Spring 2012 Self-Study Team Chair: External to the University but within
WSU Five-Year Program Review Self-Study Cover Page Department: Program: Computer Science Computer Science AS/BS Semester Submitted: Spring 2012 Self-Study Team Chair: External to the University but within
If we want to measure the amount of cereal inside the box, what tool would we use: string, square tiles, or cubes?
 String, Tiles and Cubes: A Hands-On Approach to Understanding Perimeter, Area, and Volume Teaching Notes Teacher-led discussion: 1. Pre-Assessment: Show students the equipment that you have to measure
String, Tiles and Cubes: A Hands-On Approach to Understanding Perimeter, Area, and Volume Teaching Notes Teacher-led discussion: 1. Pre-Assessment: Show students the equipment that you have to measure
WHAT ARE VIRTUAL MANIPULATIVES?
 by SCOTT PIERSON AA, Community College of the Air Force, 1992 BS, Eastern Connecticut State University, 2010 A VIRTUAL MANIPULATIVES PROJECT SUBMITTED IN PARTIAL FULFILLMENT OF THE REQUIREMENTS FOR TECHNOLOGY
by SCOTT PIERSON AA, Community College of the Air Force, 1992 BS, Eastern Connecticut State University, 2010 A VIRTUAL MANIPULATIVES PROJECT SUBMITTED IN PARTIAL FULFILLMENT OF THE REQUIREMENTS FOR TECHNOLOGY
Grade 2: Using a Number Line to Order and Compare Numbers Place Value Horizontal Content Strand
 Grade 2: Using a Number Line to Order and Compare Numbers Place Value Horizontal Content Strand Texas Essential Knowledge and Skills (TEKS): (2.1) Number, operation, and quantitative reasoning. The student
Grade 2: Using a Number Line to Order and Compare Numbers Place Value Horizontal Content Strand Texas Essential Knowledge and Skills (TEKS): (2.1) Number, operation, and quantitative reasoning. The student
NUMBERS AND OPERATIONS
 SAT TIER / MODULE I: M a t h e m a t i c s NUMBERS AND OPERATIONS MODULE ONE COUNTING AND PROBABILITY Before You Begin When preparing for the SAT at this level, it is important to be aware of the big picture
SAT TIER / MODULE I: M a t h e m a t i c s NUMBERS AND OPERATIONS MODULE ONE COUNTING AND PROBABILITY Before You Begin When preparing for the SAT at this level, it is important to be aware of the big picture
BAYLOR COLLEGE OF MEDICINE ACADEMY WEEKLY INSTRUCTIONAL AGENDA 8 th Grade 02/20/ /24/2017
 BAYLOR COLLEGE OF MEDICINE ACADEMY WEEKLY INSTRUCTIONAL AGENDA 8 th Grade 02/20/2017 02/24/2017 ANNOUNCEMENTS AND REMINDERS 8 th GRADE END-OF-YEAR ACTIVITIES 8 th Grade Activities Week May 15 to May 18
BAYLOR COLLEGE OF MEDICINE ACADEMY WEEKLY INSTRUCTIONAL AGENDA 8 th Grade 02/20/2017 02/24/2017 ANNOUNCEMENTS AND REMINDERS 8 th GRADE END-OF-YEAR ACTIVITIES 8 th Grade Activities Week May 15 to May 18
GETTING POSITIVE NEWS COVERAGE
 IBTTA 2015 WEBINAR SERIES 201 Media Training GETTING POSITIVE NEWS COVERAGE This session was created by Singer Communications for IBTTA for internal IBTTA use only Why PR? Increases visibility Gets your
IBTTA 2015 WEBINAR SERIES 201 Media Training GETTING POSITIVE NEWS COVERAGE This session was created by Singer Communications for IBTTA for internal IBTTA use only Why PR? Increases visibility Gets your
ReinForest: Multi-Domain Dialogue Management Using Hierarchical Policies and Knowledge Ontology
 ReinForest: Multi-Domain Dialogue Management Using Hierarchical Policies and Knowledge Ontology Tiancheng Zhao CMU-LTI-16-006 Language Technologies Institute School of Computer Science Carnegie Mellon
ReinForest: Multi-Domain Dialogue Management Using Hierarchical Policies and Knowledge Ontology Tiancheng Zhao CMU-LTI-16-006 Language Technologies Institute School of Computer Science Carnegie Mellon
Problem of the Month: Movin n Groovin
 : The Problems of the Month (POM) are used in a variety of ways to promote problem solving and to foster the first standard of mathematical practice from the Common Core State Standards: Make sense of
: The Problems of the Month (POM) are used in a variety of ways to promote problem solving and to foster the first standard of mathematical practice from the Common Core State Standards: Make sense of
Designing a Rubric to Assess the Modelling Phase of Student Design Projects in Upper Year Engineering Courses
 Designing a Rubric to Assess the Modelling Phase of Student Design Projects in Upper Year Engineering Courses Thomas F.C. Woodhall Masters Candidate in Civil Engineering Queen s University at Kingston,
Designing a Rubric to Assess the Modelling Phase of Student Design Projects in Upper Year Engineering Courses Thomas F.C. Woodhall Masters Candidate in Civil Engineering Queen s University at Kingston,
Algorithms and Data Structures (NWI-IBC027)
") Algorithms and Data Structures (NWI-IBC027) Frits Vaandrager F.Vaandrager@cs.ru.nl Institute for Computing and Information Sciences 7th September 2017 Frits Vaandrager 7th September 2017 Lecture 1 1 /
Algorithms and Data Structures (NWI-IBC027) Frits Vaandrager F.Vaandrager@cs.ru.nl Institute for Computing and Information Sciences 7th September 2017 Frits Vaandrager 7th September 2017 Lecture 1 1 /
SOUTHERN MAINE COMMUNITY COLLEGE South Portland, Maine 04106
 SOUTHERN MAINE COMMUNITY COLLEGE South Portland, Maine 04106 Title: Precalculus Catalog Number: MATH 190 Credit Hours: 3 Total Contact Hours: 45 Instructor: Gwendolyn Blake Email: gblake@smccme.edu Website:
SOUTHERN MAINE COMMUNITY COLLEGE South Portland, Maine 04106 Title: Precalculus Catalog Number: MATH 190 Credit Hours: 3 Total Contact Hours: 45 Instructor: Gwendolyn Blake Email: gblake@smccme.edu Website:
Extending Place Value with Whole Numbers to 1,000,000
 Grade 4 Mathematics, Quarter 1, Unit 1.1 Extending Place Value with Whole Numbers to 1,000,000 Overview Number of Instructional Days: 10 (1 day = 45 minutes) Content to Be Learned Recognize that a digit
Grade 4 Mathematics, Quarter 1, Unit 1.1 Extending Place Value with Whole Numbers to 1,000,000 Overview Number of Instructional Days: 10 (1 day = 45 minutes) Content to Be Learned Recognize that a digit
Cognitive Modeling. Tower of Hanoi: Description. Tower of Hanoi: The Task. Lecture 5: Models of Problem Solving. Frank Keller.
 Cognitive Modeling Lecture 5: Models of Problem Solving Frank Keller School of Informatics University of Edinburgh keller@inf.ed.ac.uk January 22, 2008 1 2 3 4 Reading: Cooper (2002:Ch. 4). Frank Keller
Cognitive Modeling Lecture 5: Models of Problem Solving Frank Keller School of Informatics University of Edinburgh keller@inf.ed.ac.uk January 22, 2008 1 2 3 4 Reading: Cooper (2002:Ch. 4). Frank Keller
Classifying combinations: Do students distinguish between different types of combination problems?
 Classifying combinations: Do students distinguish between different types of combination problems? Elise Lockwood Oregon State University Nicholas H. Wasserman Teachers College, Columbia University William
Classifying combinations: Do students distinguish between different types of combination problems? Elise Lockwood Oregon State University Nicholas H. Wasserman Teachers College, Columbia University William
Laboratorio di Intelligenza Artificiale e Robotica
 Laboratorio di Intelligenza Artificiale e Robotica A.A. 2008-2009 Outline 2 Machine Learning Unsupervised Learning Supervised Learning Reinforcement Learning Genetic Algorithms Genetics-Based Machine Learning
Laboratorio di Intelligenza Artificiale e Robotica A.A. 2008-2009 Outline 2 Machine Learning Unsupervised Learning Supervised Learning Reinforcement Learning Genetic Algorithms Genetics-Based Machine Learning
The Strong Minimalist Thesis and Bounded Optimality
 The Strong Minimalist Thesis and Bounded Optimality DRAFT-IN-PROGRESS; SEND COMMENTS TO RICKL@UMICH.EDU Richard L. Lewis Department of Psychology University of Michigan 27 March 2010 1 Purpose of this
The Strong Minimalist Thesis and Bounded Optimality DRAFT-IN-PROGRESS; SEND COMMENTS TO RICKL@UMICH.EDU Richard L. Lewis Department of Psychology University of Michigan 27 March 2010 1 Purpose of this
Given a directed graph G =(N A), where N is a set of m nodes and A. destination node, implying a direction for ow to follow. Arcs have limitations
, where N is a set of m nodes and A. destination node, implying a direction for ow to follow. Arcs have limitations") 4 Interior point algorithms for network ow problems Mauricio G.C. Resende AT&T Bell Laboratories, Murray Hill, NJ 07974-2070 USA Panos M. Pardalos The University of Florida, Gainesville, FL 32611-6595
4 Interior point algorithms for network ow problems Mauricio G.C. Resende AT&T Bell Laboratories, Murray Hill, NJ 07974-2070 USA Panos M. Pardalos The University of Florida, Gainesville, FL 32611-6595
An Introduction to Simio for Beginners
 An Introduction to Simio for Beginners C. Dennis Pegden, Ph.D. This white paper is intended to introduce Simio to a user new to simulation. It is intended for the manufacturing engineer, hospital quality
An Introduction to Simio for Beginners C. Dennis Pegden, Ph.D. This white paper is intended to introduce Simio to a user new to simulation. It is intended for the manufacturing engineer, hospital quality
A Metacognitive Approach to Support Heuristic Solution of Mathematical Problems
 A Metacognitive Approach to Support Heuristic Solution of Mathematical Problems John TIONG Yeun Siew Centre for Research in Pedagogy and Practice, National Institute of Education, Nanyang Technological
A Metacognitive Approach to Support Heuristic Solution of Mathematical Problems John TIONG Yeun Siew Centre for Research in Pedagogy and Practice, National Institute of Education, Nanyang Technological
Major Milestones, Team Activities, and Individual Deliverables
 Major Milestones, Team Activities, and Individual Deliverables Milestone #1: Team Semester Proposal Your team should write a proposal that describes project objectives, existing relevant technology, engineering
Major Milestones, Team Activities, and Individual Deliverables Milestone #1: Team Semester Proposal Your team should write a proposal that describes project objectives, existing relevant technology, engineering
Modeling user preferences and norms in context-aware systems
 Modeling user preferences and norms in context-aware systems Jonas Nilsson, Cecilia Lindmark Jonas Nilsson, Cecilia Lindmark VT 2016 Bachelor's thesis for Computer Science, 15 hp Supervisor: Juan Carlos
Modeling user preferences and norms in context-aware systems Jonas Nilsson, Cecilia Lindmark Jonas Nilsson, Cecilia Lindmark VT 2016 Bachelor's thesis for Computer Science, 15 hp Supervisor: Juan Carlos
CS 1103 Computer Science I Honors. Fall Instructor Muller. Syllabus
 CS 1103 Computer Science I Honors Fall 2016 Instructor Muller Syllabus Welcome to CS1103. This course is an introduction to the art and science of computer programming and to some of the fundamental concepts
CS 1103 Computer Science I Honors Fall 2016 Instructor Muller Syllabus Welcome to CS1103. This course is an introduction to the art and science of computer programming and to some of the fundamental concepts
Firms and Markets Saturdays Summer I 2014
 PRELIMINARY DRAFT VERSION. SUBJECT TO CHANGE. Firms and Markets Saturdays Summer I 2014 Professor Thomas Pugel Office: Room 11-53 KMC E-mail: tpugel@stern.nyu.edu Tel: 212-998-0918 Fax: 212-995-4212 This
PRELIMINARY DRAFT VERSION. SUBJECT TO CHANGE. Firms and Markets Saturdays Summer I 2014 Professor Thomas Pugel Office: Room 11-53 KMC E-mail: tpugel@stern.nyu.edu Tel: 212-998-0918 Fax: 212-995-4212 This
Continual Curiosity-Driven Skill Acquisition from High-Dimensional Video Inputs for Humanoid Robots
 Continual Curiosity-Driven Skill Acquisition from High-Dimensional Video Inputs for Humanoid Robots Varun Raj Kompella, Marijn Stollenga, Matthew Luciw, Juergen Schmidhuber The Swiss AI Lab IDSIA, USI
Continual Curiosity-Driven Skill Acquisition from High-Dimensional Video Inputs for Humanoid Robots Varun Raj Kompella, Marijn Stollenga, Matthew Luciw, Juergen Schmidhuber The Swiss AI Lab IDSIA, USI
How to set up gradebook categories in Moodle 2.
 How to set up gradebook categories in Moodle 2. It is possible to set up the gradebook to show divisions in time such as semesters and quarters by using categories. For example, Semester 1 = main category
How to set up gradebook categories in Moodle 2. It is possible to set up the gradebook to show divisions in time such as semesters and quarters by using categories. For example, Semester 1 = main category
Experience College- and Career-Ready Assessment User Guide
 Experience College- and Career-Ready Assessment User Guide 2014-2015 Introduction Welcome to Experience College- and Career-Ready Assessment, or Experience CCRA. Experience CCRA is a series of practice
Experience College- and Career-Ready Assessment User Guide 2014-2015 Introduction Welcome to Experience College- and Career-Ready Assessment, or Experience CCRA. Experience CCRA is a series of practice
The open source development model has unique characteristics that make it in some
 Is the Development Model Right for Your Organization? A roadmap to open source adoption by Ibrahim Haddad The open source development model has unique characteristics that make it in some instances a superior
Is the Development Model Right for Your Organization? A roadmap to open source adoption by Ibrahim Haddad The open source development model has unique characteristics that make it in some instances a superior
How to analyze visual narratives: A tutorial in Visual Narrative Grammar
 How to analyze visual narratives: A tutorial in Visual Narrative Grammar Neil Cohn 2015 neilcohn@visuallanguagelab.com www.visuallanguagelab.com Abstract Recent work has argued that narrative sequential
How to analyze visual narratives: A tutorial in Visual Narrative Grammar Neil Cohn 2015 neilcohn@visuallanguagelab.com www.visuallanguagelab.com Abstract Recent work has argued that narrative sequential
Radius STEM Readiness TM
 Curriculum Guide Radius STEM Readiness TM While today s teens are surrounded by technology, we face a stark and imminent shortage of graduates pursuing careers in Science, Technology, Engineering, and
Curriculum Guide Radius STEM Readiness TM While today s teens are surrounded by technology, we face a stark and imminent shortage of graduates pursuing careers in Science, Technology, Engineering, and
UASCS Summer Planning Committee
 UASCS Summer Planning Committee Non-Negotiables One Band One Sound BUILDING TEAM CAPACITY MAXIMIZE COMMUNICATION STRENGTHEN FIRM AND CARING SCHOOL CULTURE UAS Non-negotiables RESTORATIVE DISCIPLINE APPROACH
UASCS Summer Planning Committee Non-Negotiables One Band One Sound BUILDING TEAM CAPACITY MAXIMIZE COMMUNICATION STRENGTHEN FIRM AND CARING SCHOOL CULTURE UAS Non-negotiables RESTORATIVE DISCIPLINE APPROACH
WELCOME! Of Social Competency. Using Social Thinking and. Social Thinking and. the UCLA PEERS Program 5/1/2017. My Background/ Who Am I?
 Social Thinking and the UCLA PEERS Program Joan Storey Gorsuch, M.Ed. Social Champaign Champaign, Illinois j.s.gorsuch@gmail.com WELCOME! THE And Using Social Thinking and the UCLA PEERS Program Of Social
Social Thinking and the UCLA PEERS Program Joan Storey Gorsuch, M.Ed. Social Champaign Champaign, Illinois j.s.gorsuch@gmail.com WELCOME! THE And Using Social Thinking and the UCLA PEERS Program Of Social
Generating Test Cases From Use Cases
 1 of 13 1/10/2007 10:41 AM Generating Test Cases From Use Cases by Jim Heumann Requirements Management Evangelist Rational Software pdf (155 K) In many organizations, software testing accounts for 30 to
1 of 13 1/10/2007 10:41 AM Generating Test Cases From Use Cases by Jim Heumann Requirements Management Evangelist Rational Software pdf (155 K) In many organizations, software testing accounts for 30 to
Syntax Parsing 1. Grammars and parsing 2. Top-down and bottom-up parsing 3. Chart parsers 4. Bottom-up chart parsing 5. The Earley Algorithm
 Syntax Parsing 1. Grammars and parsing 2. Top-down and bottom-up parsing 3. Chart parsers 4. Bottom-up chart parsing 5. The Earley Algorithm syntax: from the Greek syntaxis, meaning setting out together
Syntax Parsing 1. Grammars and parsing 2. Top-down and bottom-up parsing 3. Chart parsers 4. Bottom-up chart parsing 5. The Earley Algorithm syntax: from the Greek syntaxis, meaning setting out together
Airplane Rescue: Social Studies. LEGO, the LEGO logo, and WEDO are trademarks of the LEGO Group The LEGO Group.
 Airplane Rescue: Social Studies LEGO, the LEGO logo, and WEDO are trademarks of the LEGO Group. 2010 The LEGO Group. Lesson Overview The students will discuss ways that people use land and their physical
Airplane Rescue: Social Studies LEGO, the LEGO logo, and WEDO are trademarks of the LEGO Group. 2010 The LEGO Group. Lesson Overview The students will discuss ways that people use land and their physical
Evolutive Neural Net Fuzzy Filtering: Basic Description
 Journal of Intelligent Learning Systems and Applications, 2010, 2: 12-18 doi:10.4236/jilsa.2010.21002 Published Online February 2010 (http://www.scirp.org/journal/jilsa) Evolutive Neural Net Fuzzy Filtering:
Journal of Intelligent Learning Systems and Applications, 2010, 2: 12-18 doi:10.4236/jilsa.2010.21002 Published Online February 2010 (http://www.scirp.org/journal/jilsa) Evolutive Neural Net Fuzzy Filtering:
AQUA: An Ontology-Driven Question Answering System
 AQUA: An Ontology-Driven Question Answering System Maria Vargas-Vera, Enrico Motta and John Domingue Knowledge Media Institute (KMI) The Open University, Walton Hall, Milton Keynes, MK7 6AA, United Kingdom.
AQUA: An Ontology-Driven Question Answering System Maria Vargas-Vera, Enrico Motta and John Domingue Knowledge Media Institute (KMI) The Open University, Walton Hall, Milton Keynes, MK7 6AA, United Kingdom.
"f TOPIC =T COMP COMP... OBJ
 TREATMENT OF LONG DISTANCE DEPENDENCIES IN LFG AND TAG: FUNCTIONAL UNCERTAINTY IN LFG IS A COROLLARY IN TAG" Aravind K. Joshi Dept. of Computer & Information Science University of Pennsylvania Philadelphia,
TREATMENT OF LONG DISTANCE DEPENDENCIES IN LFG AND TAG: FUNCTIONAL UNCERTAINTY IN LFG IS A COROLLARY IN TAG" Aravind K. Joshi Dept. of Computer & Information Science University of Pennsylvania Philadelphia,
Lecture 1.1: What is a group?
 Lecture 1.1: What is a group? Matthew Macauley Department of Mathematical Sciences Clemson University http://www.math.clemson.edu/~macaule/ Math 4120, Modern Algebra M. Macauley (Clemson) Lecture 1.1:
Lecture 1.1: What is a group? Matthew Macauley Department of Mathematical Sciences Clemson University http://www.math.clemson.edu/~macaule/ Math 4120, Modern Algebra M. Macauley (Clemson) Lecture 1.1:
Story Problems with. Missing Parts. s e s s i o n 1. 8 A. Story Problems with. More Story Problems with. Missing Parts
 s e s s i o n 1. 8 A Math Focus Points Developing strategies for solving problems with unknown change/start Developing strategies for recording solutions to story problems Using numbers and standard notation
s e s s i o n 1. 8 A Math Focus Points Developing strategies for solving problems with unknown change/start Developing strategies for recording solutions to story problems Using numbers and standard notation
Learning Prospective Robot Behavior
 Learning Prospective Robot Behavior Shichao Ou and Rod Grupen Laboratory for Perceptual Robotics Computer Science Department University of Massachusetts Amherst {chao,grupen}@cs.umass.edu Abstract This
Learning Prospective Robot Behavior Shichao Ou and Rod Grupen Laboratory for Perceptual Robotics Computer Science Department University of Massachusetts Amherst {chao,grupen}@cs.umass.edu Abstract This
Introduction to Causal Inference. Problem Set 1. Required Problems
 Introduction to Causal Inference Problem Set 1 Professor: Teppei Yamamoto Due Friday, July 15 (at beginning of class) Only the required problems are due on the above date. The optional problems will not
Introduction to Causal Inference Problem Set 1 Professor: Teppei Yamamoto Due Friday, July 15 (at beginning of class) Only the required problems are due on the above date. The optional problems will not
CSL465/603 - Machine Learning
 CSL465/603 - Machine Learning Fall 2016 Narayanan C Krishnan ckn@iitrpr.ac.in Introduction CSL465/603 - Machine Learning 1 Administrative Trivia Course Structure 3-0-2 Lecture Timings Monday 9.55-10.45am
CSL465/603 - Machine Learning Fall 2016 Narayanan C Krishnan ckn@iitrpr.ac.in Introduction CSL465/603 - Machine Learning 1 Administrative Trivia Course Structure 3-0-2 Lecture Timings Monday 9.55-10.45am
IMGD Technical Game Development I: Iterative Development Techniques. by Robert W. Lindeman
 IMGD 3000 - Technical Game Development I: Iterative Development Techniques by Robert W. Lindeman gogo@wpi.edu Motivation The last thing you want to do is write critical code near the end of a project Induces
IMGD 3000 - Technical Game Development I: Iterative Development Techniques by Robert W. Lindeman gogo@wpi.edu Motivation The last thing you want to do is write critical code near the end of a project Induces
EQuIP Review Feedback
 EQuIP Review Feedback Lesson/Unit Name: On the Rainy River and The Red Convertible (Module 4, Unit 1) Content Area: English language arts Grade Level: 11 Dimension I Alignment to the Depth of the CCSS
EQuIP Review Feedback Lesson/Unit Name: On the Rainy River and The Red Convertible (Module 4, Unit 1) Content Area: English language arts Grade Level: 11 Dimension I Alignment to the Depth of the CCSS
Introduction. Chem 110: Chemical Principles 1 Sections 40-52
 Introduction Chem 110: Chemical Principles 1 Sections 40-52 Instructor: Dr. Squire J. Booker 302 Chemistry Building 814-865-8793 squire@psu.edu (sjb14@psu.edu) Lectures: Monday (M), Wednesday (W), Friday
Introduction Chem 110: Chemical Principles 1 Sections 40-52 Instructor: Dr. Squire J. Booker 302 Chemistry Building 814-865-8793 squire@psu.edu (sjb14@psu.edu) Lectures: Monday (M), Wednesday (W), Friday
ECE-492 SENIOR ADVANCED DESIGN PROJECT
 ECE-492 SENIOR ADVANCED DESIGN PROJECT Meeting #3 1 ECE-492 Meeting#3 Q1: Who is not on a team? Q2: Which students/teams still did not select a topic? 2 ENGINEERING DESIGN You have studied a great deal
ECE-492 SENIOR ADVANCED DESIGN PROJECT Meeting #3 1 ECE-492 Meeting#3 Q1: Who is not on a team? Q2: Which students/teams still did not select a topic? 2 ENGINEERING DESIGN You have studied a great deal
The Evolution of Random Phenomena
 The Evolution of Random Phenomena A Look at Markov Chains Glen Wang glenw@uchicago.edu Splash! Chicago: Winter Cascade 2012 Lecture 1: What is Randomness? What is randomness? Can you think of some examples
The Evolution of Random Phenomena A Look at Markov Chains Glen Wang glenw@uchicago.edu Splash! Chicago: Winter Cascade 2012 Lecture 1: What is Randomness? What is randomness? Can you think of some examples